“Everything is repeated, in a circle. History is a master because it teaches us that it doesn’t exist. It’s the permutations that matter.” So wrote Umberto Eco in his Focault’s Pendulum. Somehow we, humans, are helping these repetitions to happen. I can see it quite clearly looking at my own adventures. In the previous post we have started our adventure with nuts flipping in space. But very soon I moved to quaternions. Frankly speaking quaternions are not absolutely necessary. We could avoid them and stay with real 3×3 real rotation matrices, known to every engineer. So, why did I call quaternions into teh game? Sure, they are somewhat exotic and cool. That is a good reason. But the truth is that with quaternions I am relating my today’s adventure with Dzhanibekov’s effect to my old adventure with Quantum Fractals. In my monograph on Quantum Fractals
 you can find the following images from quantum theory of pure spin 1/2. These images represent what mathematicians often call ‘Villarceau circles’ and ‘Hopf fibration’.
you can find the following images from quantum theory of pure spin 1/2. These images represent what mathematicians often call ‘Villarceau circles’ and ‘Hopf fibration’.
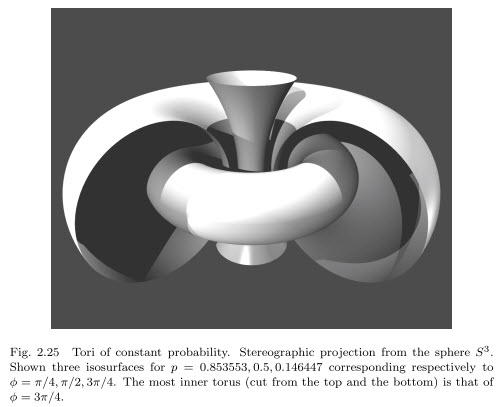
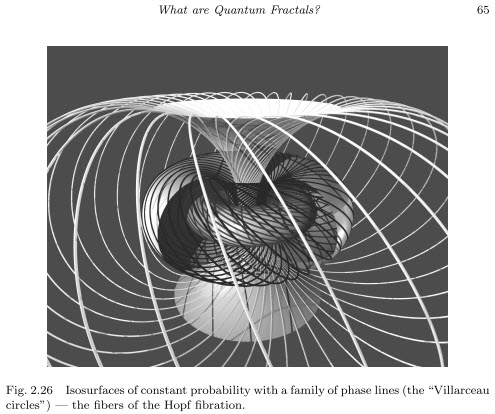
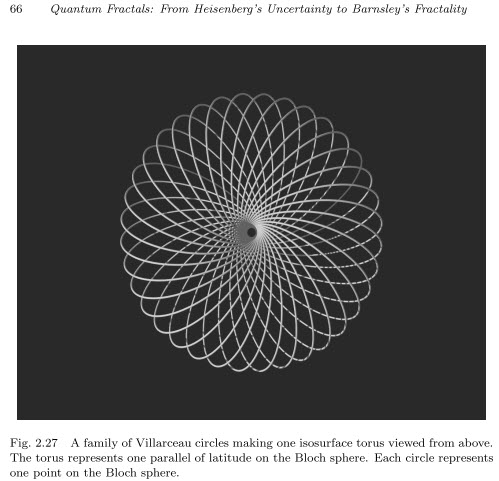
That was in my quantum past. I really liked the Villarceau circles. They seem to have some magic in them:

I also like Penrose, Hopf fibration and Clifford parallels
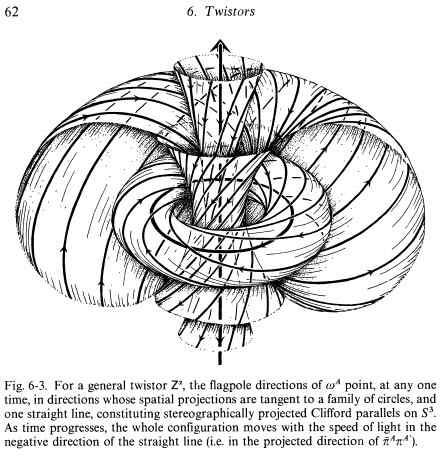
And today, at the end of this post you will see the same structures reappearing – when quaternions are used for rotating the winged nut in space.
Therefore, let us continue from the last post.
In order to visualize the trajectories we do stereographic projection from  with removed one point,
with removed one point,  onto
onto  . Denoting
. Denoting  the coordinates in we take
the coordinates in we take
(1) 
The inverse transformation is given by
(2) 
where 
We now take a point in , transform it into a point  on , apply the right shift to obtain
on , apply the right shift to obtain  and project to get
and project to get  The result is
The result is
(3) 
First consider the special trajectory through the origin  therefore
therefore  It is given by
It is given by 
Using trigonometric identities we get  The trajectory is therefore the
The trajectory is therefore the  -axis. It is the stereographic projection of the curve
-axis. It is the stereographic projection of the curve  connecting
connecting  with
with 
The second special case is when  and
and  We get the unit circle in the plane
We get the unit circle in the plane 
(4) 
Apart of these two special cases every trajectory intersects the plane twice. Therefore it is enough to restrict to the trajectories originating at points with We introduce polar coordinates on the plane With  we set
we set  With the equations for trajectories become:
With the equations for trajectories become:
(5) 
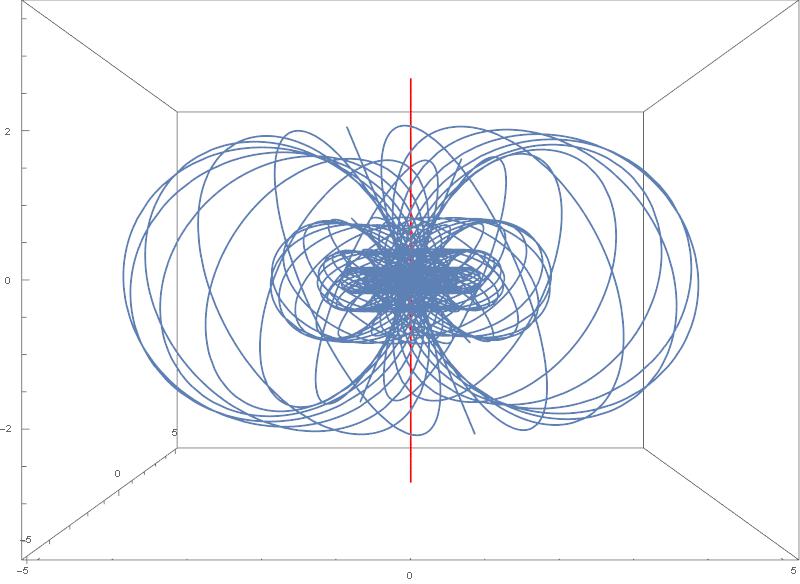
Family of trajectories for  front view.
front view.
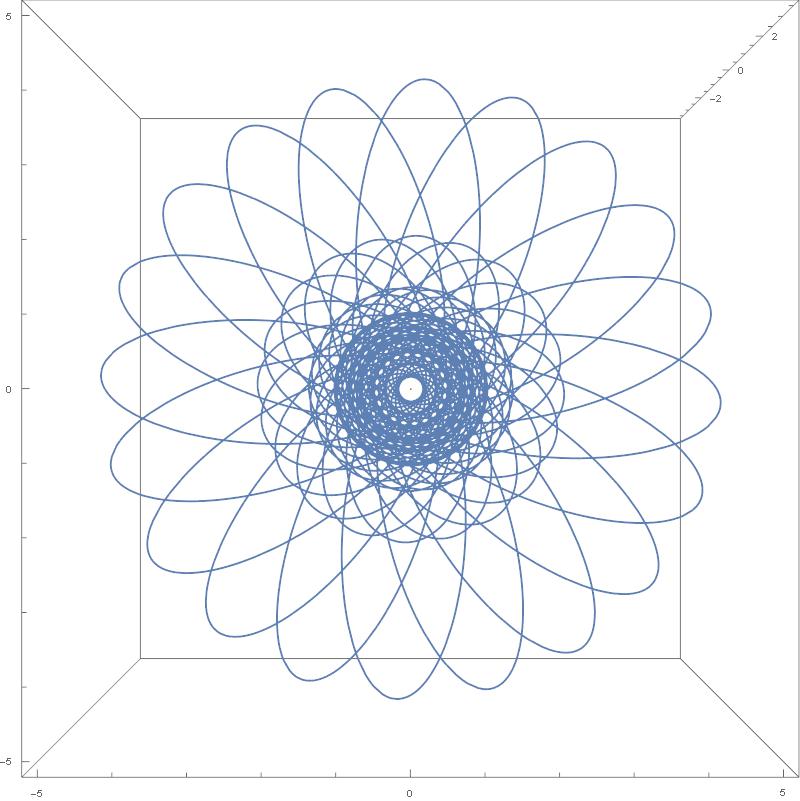
Family of trajectories for top view.





Finally got somewhere with this. http://imgur.com/URYCUMm
Big progress! Congratulations!
Have been playing around with this. Running t= 0..2 Pi and alpha=0..Pi/8. Interesting.
http://imgur.com/a/aYBoV
Looks somewhat like what you geodesics are producing.
Can you explain what this these plots are representing here?
Tell me what exactly you are plotting? Eq. (5)?
Yes I am plotting Eq. (5)

plt2 := plot3d([x(t), y(t), z(t)], t = 0 .. 2*Pi, alpha = 0 .. (1/8)*Pi, style = wireframe, colour = purple, scaling = constrained)
What I did:
x := 2*rho*cos(alpha-t)/(1+rho^2+(-rho^2+1)*cos(t)); y := 2*rho*sin(alpha-t)/(1+rho^2+(-rho^2+1)*cos(t)); z := -(-rho^2+1)*sin(t)/(1+rho^2+(-rho^2+1)*cos(t));
x02 := subs(rho = .2, x); y02 := subs(rho = .2, y); z02 := subs(rho = .2, z); x04 := subs(rho = .4, x); y04 := subs(rho = .4, y); z04 := subs(rho = .4, z); x06 := subs(rho = .6, x); y06 := subs(rho = .6, y); z06 := subs(rho = .6, z);
plot3d({[x02, y02, z02], [x04, y04, z04], [x06, y06, z06]}, t = 0 .. 2*Pi, alpha = 0 .. Pi, grid = [100, 100])
Thank you,
Nicer, grid option makes the resolution much better I was playing around with numpoints.
So what does this represent? I see there is a circle that is tilted over depending on the value of rho. t & alpha determine how much of the whole structure is plotted.
I see the circle is ofset wrt to the orign. This is buried in the details to the equations. I probably need to understand the detail. Could you shed some light on that aspect?
How did you place the picture directly in the reply?
Ah… So many levels of details to learn.
Edit:- New editor is better
Nice post!
Video: https://imgur.com/a/ZcveGRB