Non-Euclidean geometry was invented because not everybody was happy with the fifth postulate of plane Euclid’s geometry. The fifth postulate can be formulated in several equivalent ways, one of its versions, the one that is of interest for us, states that for every straight line and every point that is not on this line, there is a unique parallel line passing through this point. The definition of parallel lines is that they extend infinitely long in both direction without intersection.
Many mathematicians believed that the fifth postulate should somehow follow from other postulates – until models of geometry were constructed with all other postulates satisfied, but the fifth postulate violated. Hyperbolic geometry of the disk that we are studying has this property.
We started playing with parallel lines of the disk geometry in the last post. We will continue it now, but, for change, we will play a little bit more with the devil of the algebra.
Our hyperbolic geometry model is based on invariants of the fractional linear action of SU(1,1) on the unit disk  in the complex plane. The group SU(1,1) acts transitively on the disk. In SU(1,1) decomposition we have seen that every matrix
in the complex plane. The group SU(1,1) acts transitively on the disk. In SU(1,1) decomposition we have seen that every matrix  in SU(1,1) can be uniquely decomposed into a product
in SU(1,1) can be uniquely decomposed into a product  with
with  positive and
positive and  unitary, both in SU(1,1).
unitary, both in SU(1,1).
(1) 
(2) 
The fractional linear transformation defined by  maps the origin
maps the origin  to
to 
Remark: Given a complex  matrix
matrix  we define its action on the complex plane by the fractional linear transformation
we define its action on the complex plane by the fractional linear transformation
(3) 
This is our choice. Another possible choice, that is often used, would be 
The matrix is positive, but positivity is not an intrinsic (or “natural”) property within SU(1,1). If  is in SU(1,1), then the matrix
is in SU(1,1), then the matrix  is “similar” to
is “similar” to  but it is not necessarily positive. While it also has positive eigenvalues, it is not necessarily Hermitian. Intrinsic, natural, properties should be invariant under similarity transformations. Therefore, if only for esthetic reasons, for beauty and for pleasure, we will take now a different road. Within the group SU(1,1) there are special matrices known as parabolic. Parabolic matrices are characterized by the property that they have trace equal 2. This property is invariant under similarity transformations. Our matrix has trace different from 2. But we can compensate it by multiplying from the right by a unitary matrix, and that is what we will do now.
but it is not necessarily positive. While it also has positive eigenvalues, it is not necessarily Hermitian. Intrinsic, natural, properties should be invariant under similarity transformations. Therefore, if only for esthetic reasons, for beauty and for pleasure, we will take now a different road. Within the group SU(1,1) there are special matrices known as parabolic. Parabolic matrices are characterized by the property that they have trace equal 2. This property is invariant under similarity transformations. Our matrix has trace different from 2. But we can compensate it by multiplying from the right by a unitary matrix, and that is what we will do now.
Multiplying with from the right we get
(4) 
If we want to obtain trace equal 2, we should have
(5) 
If  then for
then for  we have two possibilities:
we have two possibilities:
(6) 
Let us choose the first possibility. Then 
We define, for each  in the disk, the matrix
in the disk, the matrix  as
as
(7) 
With this definition maps  to as before, but now is parabolic.
to as before, but now is parabolic.
In Hyperbolic geometry – Playing with parallels we were constructing SU(1,1) transformations that were mapping the straight line on the real axis on the disk into parallel lines that were limiting parallel lines – they asymptotically converged to the points  or
or  on the unit circle – the boundary of the disk:
on the unit circle – the boundary of the disk:
Here I will do the same, but using a different method, with parabolic transformations. The advantage will be that all will be clean algebraic, no hyperbolic or trigonometric functions will be needed. The devil of the algebra will be collaborating with the angel of geometry in one common project.

Let us find that leave the point fixed. Using Eqs. (3 and (7) we obtain
(8) 
Writing  after some simple manipulations, we obtain a particular solution (I am using Mathematica for such tasks):
after some simple manipulations, we obtain a particular solution (I am using Mathematica for such tasks):
![\[ y=\sqrt{x-x^2},\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-0e23b7be63d072d45f8ec009115d0dfd_l3.png "Rendered by QuickLaTeX.com")
which makes sense  Substituting this expression in the formula for produces a family
Substituting this expression in the formula for produces a family  parametrized by
parametrized by 
![\[Q_1(x)=Q(x+i\sqrt{x-x^2})=\begin{bmatrix} \frac{i \sqrt{x}}{\sqrt{1-x}}+1 & \frac{\left(\sqrt{1-x}-i \sqrt{x}\right) \left(x-i \sqrt{-(x-1) x}\right)}{\sqrt{1-x}} \\ \frac{\left(\sqrt{1-x}+i \sqrt{x}\right) \left(x+i \sqrt{-(x-1) x}\right)}{\sqrt{1-x}} & 1-\frac{i \sqrt{x}}{\sqrt{1-x}} \end{bmatrix}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-25d8376b539e7652f5ae0dc85f333199_l3.png "Rendered by QuickLaTeX.com")
The form suggests introducing a new variable,  Then the formula simplifies dramatically:
Then the formula simplifies dramatically:
(9) 
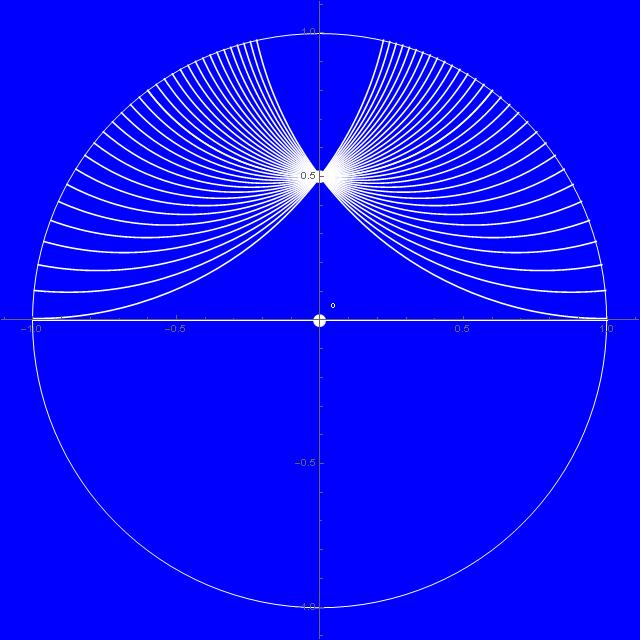
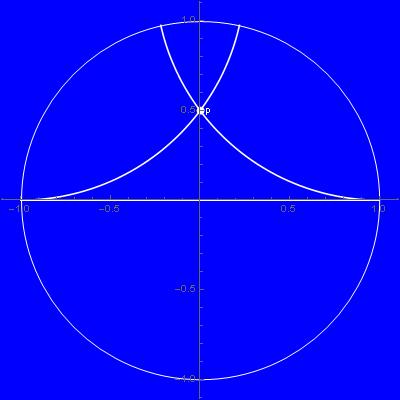
This way we have obtained a very simple family of parabolic transformations, each of them having the point fixed. Below is the result of applying these transformations to the straight line along the real axis for  with
with  in the range
in the range  step
step 
The family  is, in fact, a one-parameter group of parabolic elements in SU(1,1). We have
is, in fact, a one-parameter group of parabolic elements in SU(1,1). We have  and
and
 where
where
(10) 
The matrix  has the “nilpotent” property
has the “nilpotent” property  therefore
therefore  reduces to
reduces to 
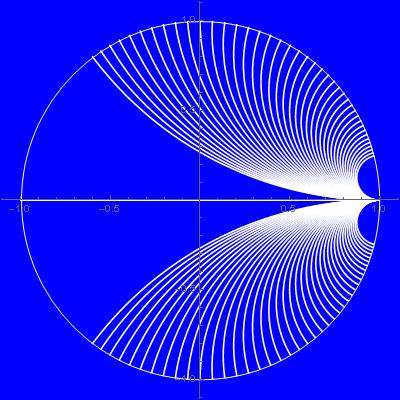
Repeating the same as above, but for we would get one-parameter group of parabolic matrices 
(11) 
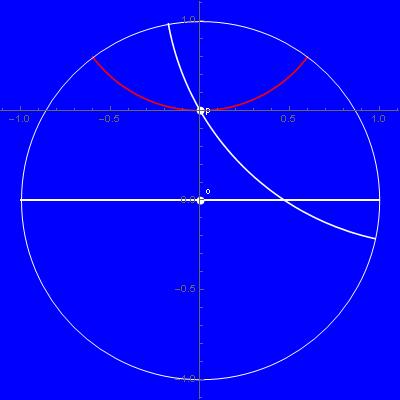
Let us now return to the transformations and how they transform the points on the real axis into a segment of a circle – circle according to the Euclidean geometry, straight line according to hyperbolic geometry. Using Eqs. (9) and (3) we get:
(12) 
Let us take one particular line, say, for  WE easily find that the real part of the expression above vanishes at
WE easily find that the real part of the expression above vanishes at  the imaginary part at this point is
the imaginary part at this point is  Thus the line defined by
Thus the line defined by  transformation intersects the vertical imaginary axis at the point
transformation intersects the vertical imaginary axis at the point  with The same holds for the line defined by
with The same holds for the line defined by 
We now want to find the formula for all lines parallel to the real axis and crossing the point  So far we know two of them – the limiting lines:
So far we know two of them – the limiting lines:
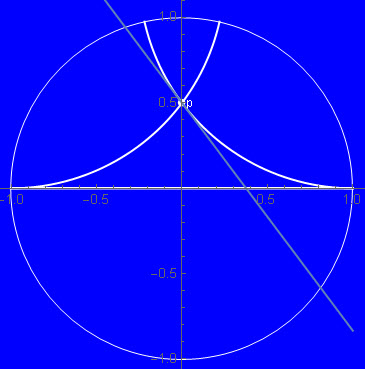
First: how to draw all straight lines passing through ? Simple: we draw straight lines through the origin  which is easy. Then we shift it to the point using either
which is easy. Then we shift it to the point using either  or
or  with
with 
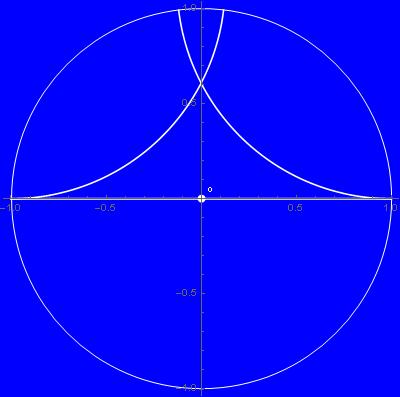
Here we can see the difference between shifts of straight lines implemented by the parabolic operation and the positive operation 
The red line is the shift of real axis by The white line is the shift by  The red line crosses the vertical line, joining
The red line crosses the vertical line, joining  and , at right angle, in a left-right symmetric way. The white line, on the other hand, crosses the horizontal and the vertical line at the same angle. I did not try to prove it, but it seems from the graph that this is the case. If so, then a proof should be straightforward, and could be useful for creating hyperbolic squares and demonstrating that the larger is the square, the smaller is the sum of its four angles.
and , at right angle, in a left-right symmetric way. The white line, on the other hand, crosses the horizontal and the vertical line at the same angle. I did not try to prove it, but it seems from the graph that this is the case. If so, then a proof should be straightforward, and could be useful for creating hyperbolic squares and demonstrating that the larger is the square, the smaller is the sum of its four angles.
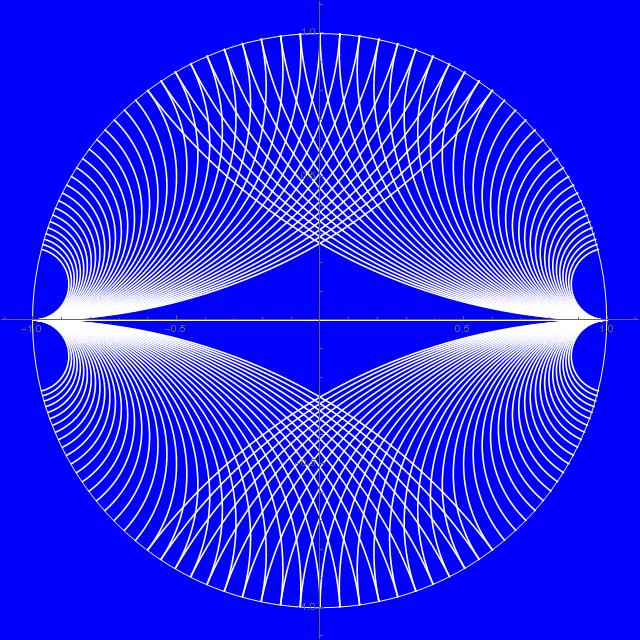
For our present purpose of creating a family of straight lines through , and parallel to the real axis, it is more convenient to use
(13) 
Given angle 
 the line through the origin is
the line through the origin is  where
where  varies between
varies between  and 1. We lift it using and get
and 1. We lift it using and get
(14) 
We look at the left end, for  and find for which
and find for which  we have
we have  That is easy and the result is
That is easy and the result is
(15) 
In fact, we could obtain this value by examining the angle of intersection of the limiting line with the vertical. I checked it numerically. Geometrical justification is probably easy. Notice that our particular angle happens to be one of the angles of the famous Pythagorean 3-4-5 triangle.
We can now draw a family of straight lines through the origin, with angles between  and
and