In the last post, SU(1,1) straight lines on the disk, we have seen families of straight lines of the hyperbolic geometry on the disk. Here is another family:
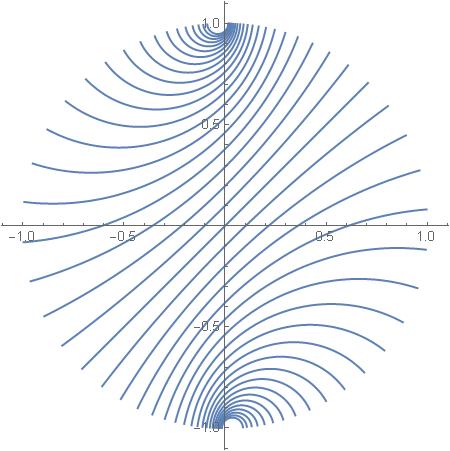
These lines are straight and they are parallel to each other, except that not in Euclidean geometry of the plane, but in the hyperbolic geometry that is based on constructions that are invariant with respect to SU(1,1) fractional linear transformations that we have met in previous notes.
These lines are obtained by applying SU(1,1) transformations to one straight line. Therefore they are not only all straight, but they all have the same length. This observation is not, however, very revealing, because, as we will see later, in the forthcoming notes, all these lines are of infinite length. The reason that they have infinite length is that they extend to the very ends of the disk universe.
In order to learn something about the length in the hyperbolic geometry of the disk let us take a segment of a straight line that is finite. I am taking the segment defined by  and
and  I apply to this segment transformations from the one-parameter group
I apply to this segment transformations from the one-parameter group  of SU(1,1) transformations defined in the previous post. Here is the result:
of SU(1,1) transformations defined in the previous post. Here is the result:
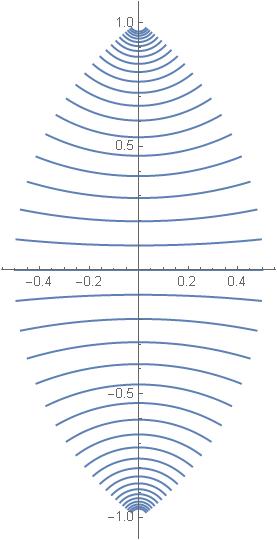
The right ends are on the trajectory of passing through the point  The one-parameter group leaves the vertical line invariant (even though it moves points on this line). Therefore the right ends are equidistant from the middle vertical straight line. But these points, even if they are in a constant distance from a straight line, are not on a straight line. This observation is related to the question asked by Bjab. In my reply I mentioned that straight lines of the hyperbolic geometry of the disk are segments of circles that meet the boundary at right angles. The pictures seem to support this property, but I did not give any proof of it, even a “baby proof”. It is now time to fill this hole.
The one-parameter group leaves the vertical line invariant (even though it moves points on this line). Therefore the right ends are equidistant from the middle vertical straight line. But these points, even if they are in a constant distance from a straight line, are not on a straight line. This observation is related to the question asked by Bjab. In my reply I mentioned that straight lines of the hyperbolic geometry of the disk are segments of circles that meet the boundary at right angles. The pictures seem to support this property, but I did not give any proof of it, even a “baby proof”. It is now time to fill this hole.
We will show that transformations from SU(1,1) preserve angles. Of course they would certainly preserve “hyperbolic angles”, by definition of hyperbolic geometry, but here we will show that they preserve Euclidean angles. They do not preserve Euclidean lengths, but angles they do preserve! One says: they are conformal.
What would it mean that angles are preserved? Let us take a point  and two curves
and two curves  such that
such that  that meet at some angle
that meet at some angle  at
at  If
If  is a matrix in SU(1,1), it sends the point to a new point
is a matrix in SU(1,1), it sends the point to a new point  and it sends the curves
and it sends the curves  and
and  to
to  and
and  The curves and
The curves and  meet at
meet at  at some angle
at some angle  . What we want to show is that
. What we want to show is that 
First we are going to simplify our task by using what we already know.
We know that SU(1,1) acts on the disk transitively. We can always move the point to the origin  If we are able to prove our statement for all SU(1,1) transformations and
If we are able to prove our statement for all SU(1,1) transformations and  then it will immediately follow that the statement is true in general.
then it will immediately follow that the statement is true in general.
We know that every transformation from SU(1,1) can be decomposed into U(1) rotation  and a positive matrix
and a positive matrix  Rotations are just Euclidean rotations about the center of the disk. They evidently preserve Euclidean angles. It is therefore enough to consider
Rotations are just Euclidean rotations about the center of the disk. They evidently preserve Euclidean angles. It is therefore enough to consider  transformations.
transformations.
Let therefore be such that  In coordinates
In coordinates  is described by functions
is described by functions 
while  is described by functions
is described by functions  Tangent vectors to and at
Tangent vectors to and at  have components
have components  and
and  respectively. The angle is determined by
respectively. The angle is determined by
![\[ \cos \alpha_0=\frac{\dot{\gamma}_1(0)\cdot\dot{\gamma}_2(0)}{|\dot{\gamma}_1(0)||\dot{\gamma}_2(0)|}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-0ce06fd99526d6e74e93b0be3e333ccb_l3.png "Rendered by QuickLaTeX.com")
Let us now take  with
with 
(1) 
It transforms  into
into  given by
given by
(2) 
Now, we differentiate with respect to  at
at  remembering that
remembering that  We use the standard quotient rule,
We use the standard quotient rule,
even if here we apply it to a function with complex values. The result that I am getting is:
(3) 
Similarly we obtain
(4) 
Therefore the components of the transformed vectors are equal to the components of the original vectors multiplied by the same positive factor. It follows that the angles between them are the same.
Of course the proof above is a baby proof. Adults know that any holomorphic transformation preserves angles on the complex plane. Easy proof can be found here.



