Riemannian metric is usually expressed through its metric tensor. For instance in Conformally Euclidean geometry of the upper half-plane we were discussing the SL(2,R) invariant Riemannian metric on the upper half-plane and came out with the formula:
(1) 
Riemannian metric in  dimensions is given by
dimensions is given by  symmetric matrix
symmetric matrix  The components of this matrix are, in general, functions of coordinates of the points of the space under consideration. Knowing the metric, we can calculate scalar product of any two tangent vectors at the same point. Knowing the scalar product of any two vectors we can calculate the metric tensor. It goes as follows. Suppose we have coordinates
The components of this matrix are, in general, functions of coordinates of the points of the space under consideration. Knowing the metric, we can calculate scalar product of any two tangent vectors at the same point. Knowing the scalar product of any two vectors we can calculate the metric tensor. It goes as follows. Suppose we have coordinates  . Sometimes the coordinates have their names, like
. Sometimes the coordinates have their names, like  but then it is often convenient to number them, for instance
but then it is often convenient to number them, for instance  , and to refer to them through their indices. When we have coordinates, we have vectors tangent to the coordinate lines. They are usually denoted as
, and to refer to them through their indices. When we have coordinates, we have vectors tangent to the coordinate lines. They are usually denoted as  or even simply
or even simply  . This is a standard notation used in differential geometry texts. So, for instance,
. This is a standard notation used in differential geometry texts. So, for instance,  is vector tangent to the coordinate line
is vector tangent to the coordinate line  , that is the line when is varying while
, that is the line when is varying while  are kept constant. More precisely: is a vector field, since we can draw the coordinate of through every point. Therefore when I write I mean the vector field or I mean one particular vector at one particular point that should be evident from the context. When it needs to be specified, we can write
are kept constant. More precisely: is a vector field, since we can draw the coordinate of through every point. Therefore when I write I mean the vector field or I mean one particular vector at one particular point that should be evident from the context. When it needs to be specified, we can write  – which means that we are specifying particular point
– which means that we are specifying particular point 
If we have scalar product  defined at every point
defined at every point  of our space, then the metric tensor at a point is given by the matrix
of our space, then the metric tensor at a point is given by the matrix
(2) 
Vectors tangent to the coordinate lines form a basis in the tangent space at every point. When we say that a given  has components
has components  , that means that
, that means that  – where we use Einstein convention implying summation over the dummy index. Thus we may write:
– where we use Einstein convention implying summation over the dummy index. Thus we may write:
(3) 
We will now calculate explicitly the coordinate expression for the metric on SL(2,R) described in the last post Riemannian metric on SL(2,R).
The coordinates on the group manifold were introduced in Parametrization of SL(2,R) through
(4) 
Let us now find the vector fields tangent to the coordinate lines:
(5) 
(6) 
(7) 
These are tangent vectors at  . According to the prescription described in Riemannian metric on SL(2,R) we need to shift them to the identity, that is we need to calculate
. According to the prescription described in Riemannian metric on SL(2,R) we need to shift them to the identity, that is we need to calculate  , and then take trace of their products:
, and then take trace of their products:
(8) 
I did these calculations using computer. Here are the results:
(9) 
(10) 
(11) 
(12) 
(13) 
The metric is not diagonal. That means the coordinate lines are not all perpendicular to each other. Moreover, the third line is “light-like”. We have  In Minkowski space-time it would mean that it is a trajectory of an object moving with the speed of light. At the group identity we have
In Minkowski space-time it would mean that it is a trajectory of an object moving with the speed of light. At the group identity we have  At this point we have
At this point we have
(14) 
In SL(2,R) generators and vector fields on the half-plane we have denoted this generator as  .
.
Once we have the metric, we can now calculate its geodesics and curvature. So, we have a plan for the following notes.
 . I am using the letter
. I am using the letter  with
with  Our two tangent vectors, say
Our two tangent vectors, say  , are vectors tangent to
, are vectors tangent to  and
and  at
at 
 the two paths are not at the identity. But we can shift them to the identity. The paths
the two paths are not at the identity. But we can shift them to the identity. The paths  at
at  are not in the Lie algebra,
are not in the Lie algebra,  are. We can use this fact and define the scalar product at
are. We can use this fact and define the scalar product at 
 rather than the unit matrix
rather than the unit matrix  to denote the group identity here, because the construction above is quite general, is being used for any Lie group, not just for SL(2,R).
to denote the group identity here, because the construction above is quite general, is being used for any Lie group, not just for SL(2,R).
 or on the upper half-plane
or on the upper half-plane  , because SL(2,R) is three-dimensional. In fact it will be a pseudo-Riemannian metric, because SL(2,R) with its natural metric looks more like space-time (one minus and two pluses, or one plus and two minuses), while
, because SL(2,R) is three-dimensional. In fact it will be a pseudo-Riemannian metric, because SL(2,R) with its natural metric looks more like space-time (one minus and two pluses, or one plus and two minuses), while 




 . But we will change the order. Instead of writing
. But we will change the order. Instead of writing  , we will write
, we will write  There is a tradition in group theory to use the KAN order. If you search Google for “KAN decomposition”, you will find a lot of information. If you look for “NAK decomposition” – you will find much less, mainly written by eccentrics.
There is a tradition in group theory to use the KAN order. If you search Google for “KAN decomposition”, you will find a lot of information. If you look for “NAK decomposition” – you will find much less, mainly written by eccentrics. , that is, after multiplying the three matrices, as
, that is, after multiplying the three matrices, as
 are coordinates of the element
are coordinates of the element 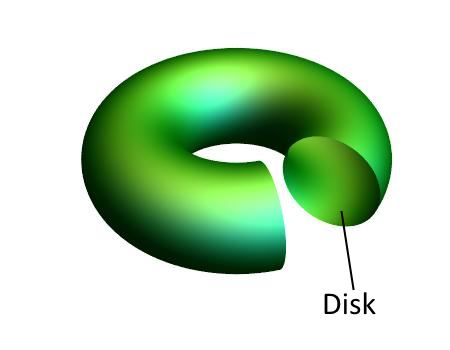
 of the torus in terms of
of the torus in terms of  we have:
we have:

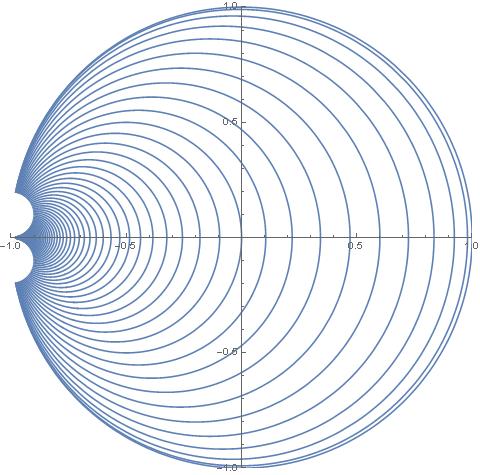
 on the disk (
on the disk ( fixed)
fixed)