I know: my blog is somewhat chaotic. But what is chaos? From “Celestial Mechanics: The Waltz of the Planets” by Alessandra Celletti and Ettore Perozzi:
Chaos From the Greek Χάος, denoting primordial emptiness. The term is used to indicate the extreme sensitivity of a trajectory to the initial conditions, which implies unpredictable dynamical behaviour in the corresponding dynamical system.

With T-handle floating in space and flipping for no apparent reason – it looks like we are in a chaotic mode:
But are we? Where is “the extreme sensitivity of a trajectory to the initial conditions“? We have to address this question. The waltz of planets can be, in some respect, chaotic. But sometimes it is well organized. Like this waltz:
1,2,3 and 1,2,3, and my T-handle that replicates the cosmic behavior in the Dzhanibekov effect (see my previous posts) has principal moments of inertia 1,2,3. Why? What 1,2,3 has to do with chaos?
Time to explain. In general, when moons and planet spin, their motion is not chaotic. But sometimes it can be. Let us take my T-handle with principal moments of inertia  (see my previous post).
(see my previous post).

Spin it about its shorter axis. It may show the strange flipping behavior – see the animated gif below (click to open it)
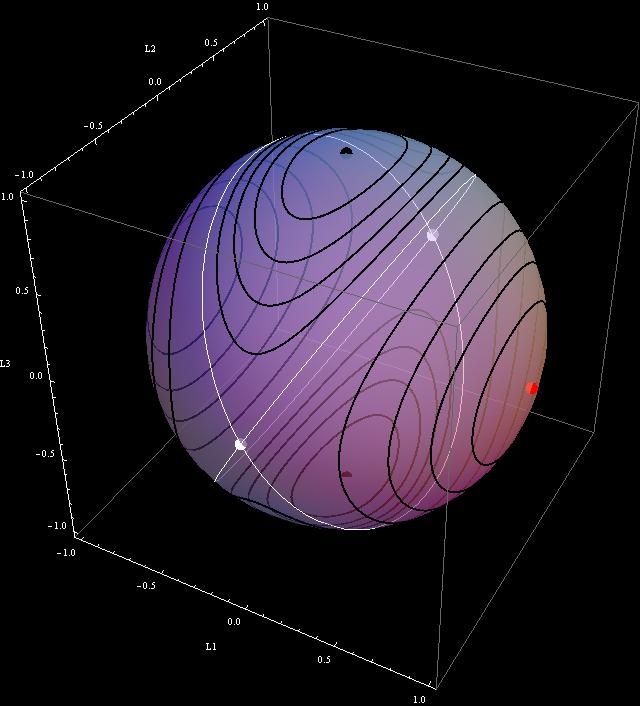
The “extreme sensitivity of a trajectory to the initial conditions” happens when the parameter  , that is the ratio of the doubled kinetic energy to squared angular momentum vector, is close to
, that is the ratio of the doubled kinetic energy to squared angular momentum vector, is close to  The motion is governed by Jacobi elliptic functions
The motion is governed by Jacobi elliptic functions  The period
The period  of these functions directly affects the time spent by the T-handle between flips. And this period is a very sensitive function of , when is close to
of these functions directly affects the time spent by the T-handle between flips. And this period is a very sensitive function of , when is close to
Here is the graph of for our T-handle:

The formula for  involves elliptic
involves elliptic  function. But for very close to
function. But for very close to  there is an approximate (asymptotic) formula derived in the paper “Janibekov’s effect and the laws of mechanics” by A.G. Petrov and S. E. Volodin, Doklady Physics}, 58(8):349–353, 2013:
there is an approximate (asymptotic) formula derived in the paper “Janibekov’s effect and the laws of mechanics” by A.G. Petrov and S. E. Volodin, Doklady Physics}, 58(8):349–353, 2013:
![\[\tau_0(d)=2\log\frac{16}{|\mu|},\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-bd0a8caeb2f1078a4df52bba2cac2be5_l3.png "Rendered by QuickLaTeX.com")
where
![\[\mu=\frac{I_2(1-d I_2)(I_3-I_1)}{(I_3-I_2)(I_2-I_1)}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-1acb04131c50f303b9229629129ce017_l3.png "Rendered by QuickLaTeX.com")
Here is how the two formulas compare:

The blue curve is the simple asymptotic formula.
But why 1,2,3?
Why? Because 1,2,3 is optimal. But what is optimal?
How do we know if 9 to 5 is the most optimal time to work? – Quora
We don’t and we never will know, because everyone is different.
So, what did I optimize to get my 1,2,3? First I had a vague feeling that this is good
Genesis 1:31 God saw all that he had made, and it was very good …
But then I was able to prove that it was good by optimizing  The dimensionless parameter
The dimensionless parameter  tells us how close we are to the critical value of
tells us how close we are to the critical value of  Being very close, near the peak in the graphs above, we want to know what should be the values of
Being very close, near the peak in the graphs above, we want to know what should be the values of  for which the period is maximal? We use the approximate formula above. To find where is the maximum of
for which the period is maximal? We use the approximate formula above. To find where is the maximum of  with
with  fixed, is to find where is the minimum of the ratio:
fixed, is to find where is the minimum of the ratio:
![\[\frac{I_2(I_3-I_1)}{(I_3-I_2)(I_2-I_1)}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-4498f3b0d46642408262cda450ab5129_l3.png "Rendered by QuickLaTeX.com")
Here cannot be completely arbitrary. The moments of inertia should satisfy the inequality  Suppose
Suppose  What should be
What should be  ? I used Mathematica to get the answer:
? I used Mathematica to get the answer:

If I assume that  then
then  If I assume that
If I assume that  then
then  Simple?
Simple?
So, even if everyone is different, even if there is no optimal answer that would satisfy everybody, there is an optimal answer to my needs, and that is 1,2,3.
“In trying to please all, he had pleased none.”
― Aesop, Aesop’s Fables
With 1,2,3 we have more time to see the butterfly flying. By flipping its wings it can change dramatically the period of the flying T-handle on the other side of the planet.

 , from x=-1, to +1. For the metal I choose the linear density to be
, from x=-1, to +1. For the metal I choose the linear density to be  So the mass of the horizontal tube is
So the mass of the horizontal tube is  The length of the vertical part is to be found. I want it to be such that the principal moments of inertia with respect to the center of mass are 1,2,3.
The length of the vertical part is to be found. I want it to be such that the principal moments of inertia with respect to the center of mass are 1,2,3. It is clear, from symmetry, that the center of mass will have
It is clear, from symmetry, that the center of mass will have  -coordinate zero. We need a formula for
-coordinate zero. We need a formula for  is at
is at  The center of mass of the vertical part, which has mass
The center of mass of the vertical part, which has mass  is at
is at  Thus the
Thus the  coordinate of the center of mass of our T-handle is
coordinate of the center of mass of our T-handle is![\[y=\frac{m_1\times 0 + m_2\times L_2/2}{m_1+m_2}=\frac{3L_2^2/2}{6+3L_2}= \frac{L_2^2}{4+2L_2}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-ae35953087c3db1da7a18eecf46fe9d7_l3.png "Rendered by QuickLaTeX.com")
 and mass
and mass  the moment of inertia with respect to the axis through its center is
the moment of inertia with respect to the axis through its center is  I checked, calculating it myself, and it is correct. Here is how you can calculate it:
I checked, calculating it myself, and it is correct. Here is how you can calculate it:![\[I=2\int_0^{L/2}x^2\mu dx=2\mu\frac{x^3}{3}|_{L/2}=2\mu\frac{L^3}{3\times 8}=m\frac{L^2}{12}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-c13f3812dce24cd82e3a9e8491e19254_l3.png "Rendered by QuickLaTeX.com")
 contributes to the moment of inertia with respect to the
contributes to the moment of inertia with respect to the  This is our
This is our 
![\[I_2=2.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-937b58dfd0a9533dd832cfae3ffa41e4_l3.png "Rendered by QuickLaTeX.com")
 so that the moment of inertia
so that the moment of inertia  of the whole body with respect to the horizontal axis through
of the whole body with respect to the horizontal axis through 

 The mass is
The mass is  so the contribution is
so the contribution is![\[I_{1,1}=0+6y^2.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-095de175c29874ee3ed3b6695bc51196_l3.png "Rendered by QuickLaTeX.com")
 since the moment of inertia of
since the moment of inertia of 
![\[I_{1,2}=\mu L_2 \frac{L_2^2}{12}+\mu L_2(L_2/2-y)^2.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-1ca8a1f490daa4387b9fd7896ff92612_l3.png "Rendered by QuickLaTeX.com")
 after some little calculation, we get
after some little calculation, we get![\[I_1=I_{1,1}+\[I_{1,2}=\frac{L_2^3(8+L_2)}{4(2+L_2)}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-08b0bca657af4328bb9f12ed425cf962_l3.png "Rendered by QuickLaTeX.com")
 This is fourth degree equation, we find that two roots are real, and only one is positive:
This is fourth degree equation, we find that two roots are real, and only one is positive:![\[L_2=1.10938.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-fac1e3d0685a87311e44dd529b4372b8_l3.png "Rendered by QuickLaTeX.com")
 m long. There is also the third, thin and weightless, rod that is perpendicular to the other two. It plays no role whatsoever, no masses are attached to its ends. It is there just for pure pleasure of the Creator.
m long. There is also the third, thin and weightless, rod that is perpendicular to the other two. It plays no role whatsoever, no masses are attached to its ends. It is there just for pure pleasure of the Creator.  -axis.
-axis.
 with respect to the first axis. There are two masses, each
with respect to the first axis. There are two masses, each  , rotating about this axis, each at the distance
, rotating about this axis, each at the distance  . The moment of inertia (I will skip the units, like kg and m) is
. The moment of inertia (I will skip the units, like kg and m) is![\[ I_1=\frac{1}{2}\, 1^2+\frac{1}{2}\,1^2=1.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-f7eb88be73d850e57517db3398279700_l3.png "Rendered by QuickLaTeX.com")

![\[I_2= \frac{1}{2}\,(\sqrt{2})^2+\frac{1}{2}\,(\sqrt{2})^2=2.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-dc519e66bb825b410515f62229d0d96d_l3.png "Rendered by QuickLaTeX.com")

![\[I_3= =\frac{1}{2}\, 1^2+\frac{1}{2}\,1^2+\frac{1}{2}\,(\sqrt{2})^2+\frac{1}{2}\,(\sqrt{2})^2=3.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-d5dd433f6c2cddd543170d456ef9497b_l3.png "Rendered by QuickLaTeX.com")