Riemannian metric is usually expressed through its metric tensor. For instance in Conformally Euclidean geometry of the upper half-plane we were discussing the SL(2,R) invariant Riemannian metric on the upper half-plane and came out with the formula:
(1)
Riemannian metric in dimensions is given by symmetric matrix The components of this matrix are, in general, functions of coordinates of the points of the space under consideration. Knowing the metric, we can calculate scalar product of any two tangent vectors at the same point. Knowing the scalar product of any two vectors we can calculate the metric tensor. It goes as follows. Suppose we have coordinates . Sometimes the coordinates have their names, like but then it is often convenient to number them, for instance , and to refer to them through their indices. When we have coordinates, we have vectors tangent to the coordinate lines. They are usually denoted as or even simply . This is a standard notation used in differential geometry texts. So, for instance, is vector tangent to the coordinate line , that is the line when is varying while are kept constant. More precisely: is a vector field, since we can draw the coordinate of through every point. Therefore when I write I mean the vector field or I mean one particular vector at one particular point that should be evident from the context. When it needs to be specified, we can write – which means that we are specifying particular point
If we have scalar product defined at every point of our space, then the metric tensor at a point is given by the matrix
(2)
Vectors tangent to the coordinate lines form a basis in the tangent space at every point. When we say that a given has components , that means that – where we use Einstein convention implying summation over the dummy index. Thus we may write:
(3)
We will now calculate explicitly the coordinate expression for the metric on SL(2,R) described in the last post Riemannian metric on SL(2,R).
The coordinates on the group manifold were introduced in Parametrization of SL(2,R) through
(4)
Let us now find the vector fields tangent to the coordinate lines:
(5)
(6)
(7)
These are tangent vectors at . According to the prescription described in Riemannian metric on SL(2,R) we need to shift them to the identity, that is we need to calculate , and then take trace of their products:
(8)
I did these calculations using computer. Here are the results:
(9)
(10)
(11)
(12)
(13)
The metric is not diagonal. That means the coordinate lines are not all perpendicular to each other. Moreover, the third line is “light-like”. We have In Minkowski space-time it would mean that it is a trajectory of an object moving with the speed of light. At the group identity we have At this point we have
We are going to discuss Riemannian metric on SL(2,R), which will be more difficult than Riemannian metric on the Poincare disk or on the upper half-plane , because SL(2,R) is three-dimensional. In fact it will be a pseudo-Riemannian metric, because SL(2,R) with its natural metric looks more like space-time (one minus and two pluses, or one plus and two minuses), while (and ) looks like space alone (all pluses).
In order to introduce the metric, to calculate geodesics and Curvature, we need to introduce coordinates. Well, in fact we don’t have to, but we will. It was the French mathematician Élie Cartan Cartan who invented the technique of doing geometry without coordinates, using the so called “moving frame” instead. That is sometimes very useful. But for now we will follow the old-fashioned straightforward way, we will use coordinates.
The group SL(2,R) is isomorphic to SU(1,1) via Cayley transformation, and we have already parametrized SU(1,1) in SU(1,1) parametrization and SU(1,1) decomposition , so in principle we could use what we already have. But we can also try something new, and then see how it relates to the old. Here I am going to use parametrization suggested by Keith Conrad in his notes on SL(2,R). Here is the beginning of his paper “DECOMPOSING ”
Decomposing SL(2,R)
We are introducing three one-parameter subgroups of SL(2,R) called
(1)
(2)
(3)
Then, as Conrad is showing, every SL(2,R) matrix decomposes uniquely into the product . But we will change the order. Instead of writing , we will write There is a tradition in group theory to use the KAN order. If you search Google for “KAN decomposition”, you will find a lot of information. If you look for “NAK decomposition” – you will find much less, mainly written by eccentrics.
We prefer NAK, because it better corresponds to the polar decomposition of SU(1,1) that we have already discussed.
So, we write as , that is, after multiplying the three matrices, as
(4)
Now are coordinates of the element of the group. Of course we would like to know how they relate to coordinates that we have introduced in the group SU(1,1). For instance in Right circular orbits in SU(1,1) we were representing SU(1,1) as a torus. How our new parameters relate to the parameters of the torus?
To answer this question we need to Cayley transform back to SU(1,1) and then express and of the torus in terms of of the NAK decomposition. I did it, using any algebraic software it is a simple task. The end result is that is the same (that is why I have chosen NAK instead of KAN, while is an algebraic function of . With we have:
(5)
Thus after Cayley transform to SU(1,1) become coordinates on the unit disk – the cross-section of the torus. Here are their lines transformed to the disk: Lines of on the disk ( fixed)
Lines of on the disk ( fixed)Lines of and on the disk
“Turtles all the way down” is an expression of the infinite regress problem in cosmology posed by the “unmoved mover” paradox. The metaphor in the anecdote represents a popular notion of the model that Earth is actually flat and is supported on the back of a World Turtle, which itself is propped up by a column of turtles.[1] Questioning what the final turtle might be standing on, the anecdote humorously concludes that it is “turtles all the way down”
After a lecture on cosmology and the structure of the solar system, William James was accosted by a little old lady.
“Your theory that the sun is the centre of the solar system, and the earth is a ball which rotates around it has a very convincing ring to it, Mr. James, but it’s wrong. I’ve got a better theory,” said the little old lady.
“And what is that, madam?” Inquired James politely.
“That we live on a crust of earth which is on the back of a giant turtle,”
Not wishing to demolish this absurd little theory by bringing to bear the masses of scientific evidence he had at his command, James decided to gently dissuade his opponent by making her see some of the inadequacies of her position.
“If your theory is correct, madam,” he asked, “what does this turtle stand on?”
“You’re a very clever man, Mr. James, and that’s a very good question,” replied the little old lady, “but I have an answer to it. And it is this: The first turtle stands on the back of a second, far larger, turtle, who stands directly under him.”
“But what does this second turtle stand on?” persisted James patiently.
To this the little old lady crowed triumphantly. “It’s no use, Mr. James – it’s turtles all the way down.”
—J. R. Ross, Constraints on Variables in Syntax 1967
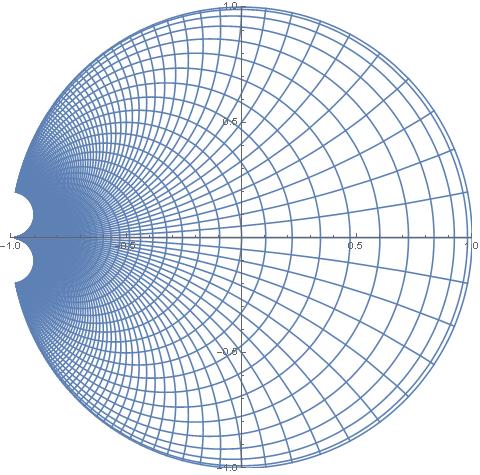
The Dedekind tessellation is a mathematical version of the flat Earth and turtles all the way down. Instead of the flat Earth we have the Poincaré disk, and instead of turtles we have circles – all the way down.
I have mentioned this subject at the end of Geodesics on the upper half-plane – parametrization, two days ago. In the meantime prof. Kocik was kind enough to send me his unpublished paper “A note on the Dedekind tessellation“. Looking inside I have found that I have made a mistake in my Mathematica program that was supposed to create my own version of the tessellation. After fixing my mistake (I have forgotten one term in my formula for the centers of the circles) I was able to create my own poor man version of the Dedekind tessellation (Kocik gives a simple method of computing the centers and the radii of all circles in the Dedekind tessellation!), and here I am going to explain, in details, how I did it.
Fig. 1: Dedekind tessellation. Click on the image to open the full size version.
Instead of the disk it is better to use the upper half-plane, where the group SL(2,R) acts by fractional linear transformations. Let me recall the action. With
(1)
the action on the upper half-plane, the set of complex numbers with is given by
(2)
Remark: In many places a different convention is being used, with defined as There is a simple relation between the two actions: we can obtain one action from another by composing it with the similarity transformation
The group SL(2,R) has a discrete subgroup SL(2,Z), often called the modular group, the group of matrices with entries that are integers. For instance the following two matrices:
(3)
In his online notes on SL(2,Z) Keith Conrad ( I recommend watching the great illusion on one of his web pages) shows that these two matrices generate (by taking inverses and products) the whole group SL(2,Z). In fact his is transposed to the one above, but that does not matter.
Dedekind tessellation of the upper half-plane is an analogue of the tessellation of the usual Euclidean plane into squares of unit side length. All the plane can be nicely covered by translations of just one square, namely by translations by an integer amount in horizontal and vertical direction. In the case of the upper half-plane instead of a square we have a triangle, so called fundamental domain. In the picture below, taken from Condrad’s paper, we see the (grayed) standard fundamental domain consisting of complex numbers with and Fundamental domain for SL(2,Z)
Sure it does not look like a triangle, but it is a triangle, with the top vertex at infinity! The bottom side is a part of the unit circle – therefore a geodesic in the hyperbolic geometry we are dealing with.
By acting on this one triangle with matrices from the group SL(2,Z) we can nicely triangulate the whole upper half-plane – that is called the Dedekind tessellation. In Wikipedia article on Modular Group, in the section on Tessellation of the hyperbolic plane, it is accompanied with the following image:
Wikipedia Dedekind tessellation
Looking at this image it occurred to me that instead of acting on the fundamental domain I can as well act on the unit half-circle and on the two vertical lines. In order to do this I need a formula how elements of SL(2,Z) transform the unit circle and the two vertical lines. And I am interested in the resulting circles, I do not care about vertical lines as they do not add much to the tessellation. Using mathematical software (I use Mathematica most of the time) the task was not too difficult.
Suppose we have a circle of radius with center at on the real axis. We apply the transformation to this circle using matrix in SL(2,R). The result is, as it can be verified without much difficulty using any computer algebra software, the circle with
(4)
(5)
We are interested in transformations of one particular circle with and Then the formulas simplify:
(6)
(7)
Of course we are interested only in the cases where the denominator is non zero.
Now suppose we have a vertical line at . It is transformed into a circle with
(8)
(9)
We are interested in two cases and only when the denominator is non zero.
Using generators above, taking their inverses and products, in different orders, I generated 35416 SL(2,Z) matrices. They can be downloaded as the file sl2.zip. The file has the format:
…
Separate matrices look as .
I will describe now, step by step, how i have created Fig. 1 above, using Mathematica. It is certainly not an optimal way, but my description may help to understand how to create Dedekind tessellation using different methods.
These are the definitions of as in Eqs. (6,7). The last one is the inverse of the radius. We want it to be Thus we create a sublist m1:
m1=Select[m, r1i[#]>0 &]
Then m1 has 35350 elements. We now use the first two lines to create the list of centers and radii:
mc = Table[{x1[m1[[i]]], r1[m1[[i]]]}, {i, 1, Length[m1]}];
But now there will be repeated elements in the list. To get rid of them I use
mc = Union[mc];
And I care only about circles with radius, say, :
mc100 = Select[mc, #[[2]] > 1/100 &];
There are only 1923 such circles.
We can already do the plot:
Dedekind tessellation Mathematica plot
The rest is optional. I added to these circles 12 circles obtained from the two vertical lines. Then I used paintnet software to invert the colors. The end result is in the Fig. 1 above.

 dimensions is given by
dimensions is given by  symmetric matrix
symmetric matrix  The components of this matrix are, in general, functions of coordinates of the points of the space under consideration. Knowing the metric, we can calculate scalar product of any two tangent vectors at the same point. Knowing the scalar product of any two vectors we can calculate the metric tensor. It goes as follows. Suppose we have coordinates
The components of this matrix are, in general, functions of coordinates of the points of the space under consideration. Knowing the metric, we can calculate scalar product of any two tangent vectors at the same point. Knowing the scalar product of any two vectors we can calculate the metric tensor. It goes as follows. Suppose we have coordinates  . Sometimes the coordinates have their names, like
. Sometimes the coordinates have their names, like  but then it is often convenient to number them, for instance
but then it is often convenient to number them, for instance  , and to refer to them through their indices. When we have coordinates, we have vectors tangent to the coordinate lines. They are usually denoted as
, and to refer to them through their indices. When we have coordinates, we have vectors tangent to the coordinate lines. They are usually denoted as  or even simply
or even simply  . This is a standard notation used in differential geometry texts. So, for instance,
. This is a standard notation used in differential geometry texts. So, for instance,  is vector tangent to the coordinate line
is vector tangent to the coordinate line  , that is the line when
, that is the line when  are kept constant. More precisely:
are kept constant. More precisely:  – which means that we are specifying particular point
– which means that we are specifying particular point 
 defined at every point
defined at every point  of our space, then the metric tensor at a point
of our space, then the metric tensor at a point 
 has components
has components  , that means that
, that means that  – where we use Einstein convention implying summation over the dummy index. Thus we may write:
– where we use Einstein convention implying summation over the dummy index. Thus we may write:




 . According to the prescription described in Riemannian metric on SL(2,R) we need to shift them to the identity, that is we need to calculate
. According to the prescription described in Riemannian metric on SL(2,R) we need to shift them to the identity, that is we need to calculate  , and then take trace of their products:
, and then take trace of their products:





 In Minkowski space-time it would mean that it is a trajectory of an object moving with the speed of light. At the group identity we have
In Minkowski space-time it would mean that it is a trajectory of an object moving with the speed of light. At the group identity we have  At this point we have
At this point we have
 .
. or on the upper half-plane
or on the upper half-plane  , because SL(2,R) is three-dimensional. In fact it will be a pseudo-Riemannian metric, because SL(2,R) with its natural metric looks more like space-time (one minus and two pluses, or one plus and two minuses), while
, because SL(2,R) is three-dimensional. In fact it will be a pseudo-Riemannian metric, because SL(2,R) with its natural metric looks more like space-time (one minus and two pluses, or one plus and two minuses), while 




 . But we will change the order. Instead of writing
. But we will change the order. Instead of writing  , we will write
, we will write  There is a tradition in group theory to use the KAN order. If you search Google for “KAN decomposition”, you will find a lot of information. If you look for “NAK decomposition” – you will find much less, mainly written by eccentrics.
There is a tradition in group theory to use the KAN order. If you search Google for “KAN decomposition”, you will find a lot of information. If you look for “NAK decomposition” – you will find much less, mainly written by eccentrics. , that is, after multiplying the three matrices, as
, that is, after multiplying the three matrices, as
 are coordinates of the element
are coordinates of the element 
 of the torus in terms of
of the torus in terms of  we have:
we have:

 on the disk (
on the disk ( fixed)
fixed)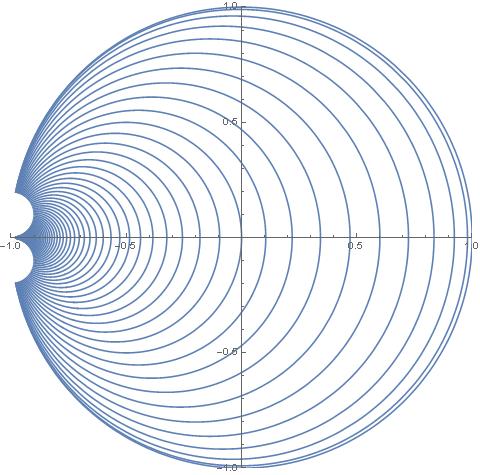



 is given by
is given by
 defined as
defined as  There is a simple relation between the two actions: we can obtain one action from another by composing it with the similarity transformation
There is a simple relation between the two actions: we can obtain one action from another by composing it with the similarity transformation ![A\mapsto \left[\begin{smallmatrix}0&1\\1&0\end{smallmatrix}\right]A\left[\begin{smallmatrix}0&1\\1&0\end{smallmatrix}\right].](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-bbc039c143a5f3794ef8034ae02d10f7_l3.png "Rendered by QuickLaTeX.com")
 matrices with entries that are integers. For instance the following two matrices:
matrices with entries that are integers. For instance the following two matrices:
 is transposed to the one above, but that does not matter.
is transposed to the one above, but that does not matter.  paper, we see the (grayed) standard fundamental domain consisting of complex numbers
paper, we see the (grayed) standard fundamental domain consisting of complex numbers  and
and 
 with center at
with center at  on the real axis. We apply the transformation
on the real axis. We apply the transformation  to this circle using matrix
to this circle using matrix  with
with

 and
and  Then the formulas simplify:
Then the formulas simplify:



 and only when the denominator is non zero.
and only when the denominator is non zero. above, taking their inverses and products, in different orders, I generated 35416 SL(2,Z) matrices. They can be downloaded as the file
above, taking their inverses and products, in different orders, I generated 35416 SL(2,Z) matrices. They can be downloaded as the file 
 .
. as in Eqs. (
as in Eqs. ( Thus we create a sublist m1:
Thus we create a sublist m1: :
: