We continue Becoming anti de Sitter.
Every matrix  in the Lie algebra o(2,2) generates one-parameter group
in the Lie algebra o(2,2) generates one-parameter group  of linear transformations of
of linear transformations of  Vectors tangent to orbits of this group form a vector field. Let us find the formula for the vector field generated by
Vectors tangent to orbits of this group form a vector field. Let us find the formula for the vector field generated by  The orbit through
The orbit through  is
is
(1) 
Differentiating at  we find the vector field
we find the vector field 
(2) 
If is a matrix with components  then has components
then has components
(3) 
Vectors tangent to coordinate lines are often denoted as  . Therefore we can write the last formula as:
. Therefore we can write the last formula as:
(4) 
In the last post Becoming anti de Sitter we have constructed six generators  Their vector fields now become
Their vector fields now become
(5) 
(6) 
Bengtsson and Sandin in their paper “Anti de Sitter space, squashed and stretched” discussed in the previous note use coordinates  . Our vector field
. Our vector field  is the same as their
is the same as their  , our
, our  is the same as their
is the same as their  etc.
etc.
In SL(2,R) Killing vector fields in coordinates we introduced six Killing vector fields acting on the group manifold SL(2,R). How they relate to the above six generators of the group O(2,2)?
Vectors from the fields  are tangent to SL(2,R). We have expressed them in coordinates of the group SL(2,R)
are tangent to SL(2,R). We have expressed them in coordinates of the group SL(2,R)  The manifold of SL(2,R) is a hipersurface of dimension 3 in
The manifold of SL(2,R) is a hipersurface of dimension 3 in  endowed with coordinates
endowed with coordinates  . What is the relation between components of the same vector in different coordinate systems? The formula is easy to derive and is very simple. If
. What is the relation between components of the same vector in different coordinate systems? The formula is easy to derive and is very simple. If  are coordinates of the vector in SL(2,R) and
are coordinates of the vector in SL(2,R) and  are coordinates of the same vector in
are coordinates of the same vector in  then
then
(7) 
How  depend on
depend on  ? That is simple. In SL(2,R) vector fields in coordinates we have represented each matrix
? That is simple. In SL(2,R) vector fields in coordinates we have represented each matrix  from SL(2,R) as
from SL(2,R) as
(8) 
On the other hand, Becoming Anti-de Sitter, we represented it as
(9) 
Therefore coordinates are easily expressed in terms of . It remains to do the calculations. I have used computer algebra software to make these calculations for me. My Mathematica notebook doing all calculations can be downloaded from here. The result of all these calculations is the expression of vector fields in terms of the generators of O(2,2) used in the paper on anti de Sitter spaces. Here is what I have obtained:
(10) 
Bengtsson and Sandin introduce then their own parametrization of SL(2,R) and study the invariant metric on the group. We will find the connection between ours and their approaches in the next posts. We came to our problems starting from T-handles spinning freely in zero gravity. They are studying spinning black holes. It is interesting to see and to research similarities.




 is implied.
is implied. Let us calculate the right hand side for
Let us calculate the right hand side for  With
With  we have
we have  therefore
therefore
 we have
we have  ,
,  . Therefore
. Therefore


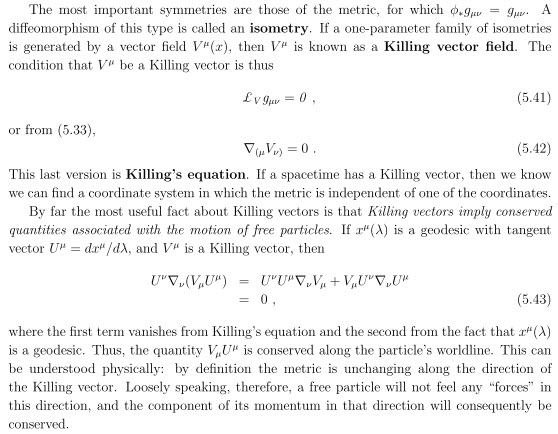
 , then
, then  is known as a Killing vector field.
is known as a Killing vector field. and the SL(2,R) group comes from the SO(2,1) group of linear transformations preserving the flat space-time metric. That could be enough for a while, but can’t we check directly if indeed we have isometries?
and the SL(2,R) group comes from the SO(2,1) group of linear transformations preserving the flat space-time metric. That could be enough for a while, but can’t we check directly if indeed we have isometries? matrices of trace zero. After exponentiation they generate one-parameter groups of SL(2,R) matrices. SL(2,R) acts on the upper-half plane
matrices of trace zero. After exponentiation they generate one-parameter groups of SL(2,R) matrices. SL(2,R) acts on the upper-half plane  by linear fractional transformations. If
by linear fractional transformations. If 
 then
then 
 then the coordinates
then the coordinates  of the transformed point become not that simple functions of the coordinates
of the transformed point become not that simple functions of the coordinates  of the original point:
of the original point:



 for any segment of any curve. Is true in our case? In order to verify it some little calculations are needed. If we listen to Leibniz:
for any segment of any curve. Is true in our case? In order to verify it some little calculations are needed. If we listen to Leibniz:


 condition. Therefore SL(2,R) transformations are indeed isometries (for our metric). Therefore our vector fields are “Killing vector fields”. Therefore we can use their properties in our derivation of geodesic equations. Which we will continue in the following post.
condition. Therefore SL(2,R) transformations are indeed isometries (for our metric). Therefore our vector fields are “Killing vector fields”. Therefore we can use their properties in our derivation of geodesic equations. Which we will continue in the following post.


