
This is a simple continuation from the last post “Taming the T-handle“. We ended up with the equation
(1) 
where
(2) 
To find  let us assume that
let us assume that  , we need to integrate
, we need to integrate
![\[\psi(t)=c_1 t+c_2\int_0^t \frac{1}{1+c_3\,\sn^2(Bs,m)}\,ds.\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-7f036448cfde2e5da026164a044259ca_l3.png "Rendered by QuickLaTeX.com")
Setting  we transform the above into
we transform the above into
![\[\psi(t)=c_1 t+\frac{c_2}{B}\int_0^{Bt} \frac{1}{1+c_3\,\sn^2(u,m)}\,du.\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-5cd2e86d8b643b4478ab0e7279883b1c_l3.png "Rendered by QuickLaTeX.com")
Searching the net we can find the integral of this type, for instance on the Wolfram’s page about elliptic integrals of the third order we can find:
![\[\Pi(n;z|m)=\int_0^{F(z|m)}\,\frac{1}{1-n\,\sn(u|m)^2}\, du.\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-845961fb6b8c7f757b8f52d2fd7f3dd3_l3.png "Rendered by QuickLaTeX.com")
Then we set  therefore
therefore  – see Jacobi amplitude- realism or cubism,
– see Jacobi amplitude- realism or cubism,
so that
![\[\psi(t)=c_1 t+\frac{c_2}{B}\,\Pi(-c_3;\am(Bt,m)|m).\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-494e0172a1cb84e2cfa5b9c1737ff070_l3.png "Rendered by QuickLaTeX.com")
In principle we could now substitute the values of  and consider our task essentially done. But that would be not very prudent! The point is that we have the parameter
and consider our task essentially done. But that would be not very prudent! The point is that we have the parameter  and, depending on the case, this parameter can have value:
and, depending on the case, this parameter can have value: 
 and
and  The case
The case  is very special and should be treated separately. No elliptic functions are needed in this case. Moreover not every software used for calculations and simulations will know what to do with
is very special and should be treated separately. No elliptic functions are needed in this case. Moreover not every software used for calculations and simulations will know what to do with  and even if it pretends to know, it may happen that in this domain the software is not sufficiently tested and debugged. It is for this reason that we now consider the three cases separately.
and even if it pretends to know, it may happen that in this domain the software is not sufficiently tested and debugged. It is for this reason that we now consider the three cases separately.
The case of  i.e.
i.e. 
This is the most straightforward case. From Taming the T-handle, Eq. (10), we have
(3) 
(4) 
Thus
![\[\frac{c_2}{B}=(I_3-I_1)\sqrt{\frac{I_2}{I_1I_3(I_3-I_2)(1-dI_1)}},\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-885cb1cf3754e8e77e6fbaaa1ef89134_l3.png "Rendered by QuickLaTeX.com")
and we are done.
The case of  i.e.
i.e. 
This is a tricky case. For we have (see Jacobi Elliptic Functions, Eqs. (33)-(35), and this comment)
(5) 
To find  we need to integrate
we need to integrate
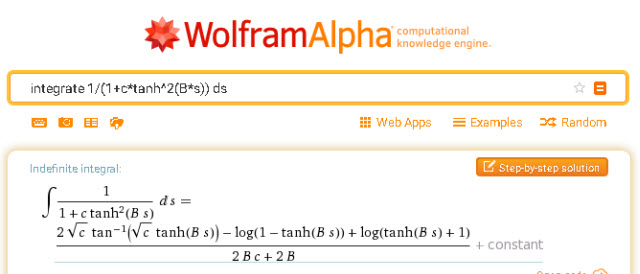
![\[\psi(t)=c_1 t+c_2\int_0^t \frac{1}{1+c_3\,\tanh^2(Bs,m)}\,ds.\]](https://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-59ae1c29ed57a65150d005d51db41237_l3.png "Rendered by QuickLaTeX.com")
We can go to Wolfram Alpha, and ask it to integrate it. It will, but we will not like the answer. It looks very-very ugly!
In principle we could try to simplify it, but it is better to make one step back in order to make two steps forward! Let us go back to Eq. (1) and write it as just one fraction:
(6) 
 and get
and get (7) 
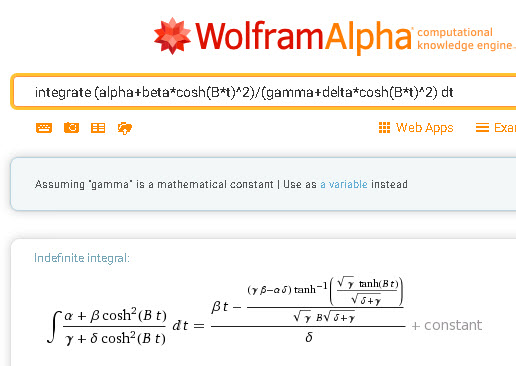
So, we need to integrate the function
(8) 
We can go again to Wolfram Alpha and what we get this time is so much nicer!
All we have to substitute the constants. It is a mechanical task, so we can use REDUCE, so we use REDUCE or any other software capable of symbolic computation. I used Mathematica. Here is the result, followed by a complete summary of the case:
(9) 
(10) 
(11) 
(12) 
(13) 
(14) 
(15) 
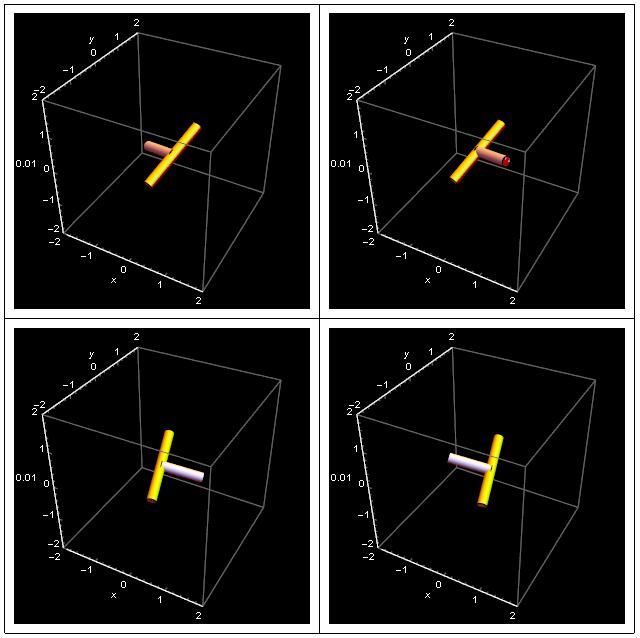
Changing signs of any two of three components  we can obtain altogether four different evolutions of a painted T_handle. But that, and also the case of
we can obtain altogether four different evolutions of a painted T_handle. But that, and also the case of  must wait for the next post.
must wait for the next post.
But here are four pictures of the painted T-handle, rotated according to the above algorithm, at  where the three last cases correspond to flipped sign of as follows:
where the three last cases correspond to flipped sign of as follows: 
Update
You can download my experimental Mathematica cdf file that can be run using free CDF Player. It shows the code and the animation for the four cases mentioned above.

->
(The dot over d is unneeded I suppose. (In many places.))
From we have ->
?
so e can ->
so we can
sign of ->
->
sign of
In (13): ->
->

All fixed. Thanks.
So now there is a hypothesis that:
velocity of the end of the leg of T-handle is always perpendicular to the plane of T-handle.
Always means: when m=1
We will look into your hypothesis within the coming new blog post.
I am struggling a bit with
 in Maple.
in Maple.

When I enter the values putting d=49/100
I get
My m is the square root of your m because of the way Maple handles Jacobi functions.
Setting t=0 have tested up to 50 the function evaluates to -.82693+3.6654*I
I have had some success by getting an amimation to run for d=1/2. I will post it when I am more sure about my code/understanding.
OK. I will look into this problem.
I noticed two things: you have opposite signs where c2 and c3 are. Perhaps you reversed the order of I1,I2,I3?
There should be + sign after t/3 and there should be -3 under EllipticPi.
The + and – reversal is Maple. It states in the FunctionAdvisor EllipticPi(-A,B,C)= -EllipticPi(A,B,C). So it swaps the signs itself. It will look further into it tonight. Would you be able to test in your Maple?
The problem is, as I see now, that EllipticPi is defined in Maple in a somewhat different way. I will try to figure it out how to convert.
The conversion is not that simple. I yet have to work it out, and then test. I think I know how to do it. And since I can’t find it online, I may devote the whole next post to this technical problem.
I found this don’t know if it helps. Scroll down to section 2.6. https://www.researchgate.net/publication/262689147_Elliptic_functions_and_elliptic_integrals_for_celestial_mechanics_and_dynamical_astronomy
mentions Mathematica and its variation on the notation.
Aside, how do I shorten these links to one word?