We start with a partial recall of events as they transpired so far. A month ago we became hyperbolic. The post Getting hyperbolic started with this sentence:
Without knowing it, during the last three posts (Our first field expedition, Our second field expedition, The Third Expedition) we became hyperbolic. Hyperbolic and conformal. Conformal and relativistic, relativistic and non-Euclidean.
Then we introduced the group SU(1,1) and its action on the disk. Then, in From SU(1,1) to the Lorentz group we realized that the disk can be considered as a projection of a hyperboloid in 2+1 dimensional space-time, where the hyperboloid is inside the future light cone. We were contemplating the image below

and we have shown that there is a group homomorphism from SU(1,1) to the Lorentz group SO(2,1) of 2+1 dimensional special relativity. We have calculated the formula explicitly in Eq. (7) there. If ![A=\left[\begin{smallmatrix}\lambda&\mu\\ \bar{\mu}&\bar{\lambda}\end{smallmatrix}\right]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-2e511c5cae985c3970df6ef6d1883bab_l3.png "Rendered by QuickLaTeX.com") is a complex matrix from SU(1,1) with
is a complex matrix from SU(1,1) with  split into real and imaginary parts, then the real
split into real and imaginary parts, then the real  matrix
matrix  from SO(2,1) is given by the formula:
from SO(2,1) is given by the formula:
(1) 
The map  is a group homomorphism, that is
is a group homomorphism, that is  and
and  ( Of course in we denote by the same symbol
( Of course in we denote by the same symbol  identity matrices of different sizes.)
identity matrices of different sizes.)
After that, in Getting real, we used Cayley transform that defines group isomorphism between the complex matrix group SU(1,1) and the real matrix group SL(2,R). With
(2) 
(3) 
we have that if ![A'=\left[\begin{smallmatrix}\alpha&\beta\\ \gamma&\delta\end{smallmatrix}\right]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-8969b960a5764336f49fd61d00bb538d_l3.png "Rendered by QuickLaTeX.com") is a real matrix from SL(2,R) (i.e.
is a real matrix from SL(2,R) (i.e.  ), then
), then  is in SU(1,1). If we calculate explicitly
is in SU(1,1). If we calculate explicitly  and
and  in terms of
in terms of  the result is:
the result is:
(4) 
Combining it with we obtain group homomorphism from SL(2,R) to SO(2,1). Explicitly
(5) 
So far, so good, but now there comes real magic!

We do not have to travel around the world, through SU(1,1) and hyperboloids. We will derive the last formula directly using a method that is similar to the one we used when deriving the map from quaternions to rotation matrices in Putting a spin on mistakes.
The Lie algebra sl(2,R) of the Lie group SL(2,R) consists of real  matrices of zero trace – we call them “generators”. We already met three particular generators
matrices of zero trace – we call them “generators”. We already met three particular generators  , for instance in SL(2,R) generators and vector fields on the half-plane, and I will skip this time primes as they have been denoted previously
, for instance in SL(2,R) generators and vector fields on the half-plane, and I will skip this time primes as they have been denoted previously
(6) 
Every element of sl(2,R) is a real linear combination of these three. So, can be considered as a basis of sl(2,R). For instance in SL(2,R) generators and vector fields on the half-plane we constructed a particular generator  and
and  defined as
defined as
(7) 
The Lie algebra sl(2,R) is a three-dimensional real vector space. But it is more than just a vector space. The group SL(2,R) acts on this space by what is called “the adjoint representation”. This is true for the Lie algebra of any Lie group. Here we have a particular case. Namely, if  is in sl(2,R), that is if has trace zero, and if
is in sl(2,R), that is if has trace zero, and if  is in SL(2,R), that is the determinant of is one, then
is in SL(2,R), that is the determinant of is one, then  is also of zero trace (we do not need the property of determinant one for this). The map
is also of zero trace (we do not need the property of determinant one for this). The map  is a linear map. Thus we have action, let us call it
is a linear map. Thus we have action, let us call it  , of SL(2,R) on sl(2,R):
, of SL(2,R) on sl(2,R):
(8) 
Remark: I will now be skipping primes that I was using to distinguish matrices from SL(2,R) from matrices from SU(1,1).
Evidently (from associativity of matrix multiplication) we have
![\[\mathcal{L}(A_1A_2)=\mathcal{L}(A_1)\mathcal{L}(A_2).\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-eaf44c72fe09ddc3fb2e0378a0344943_l3.png "Rendered by QuickLaTeX.com")
Usually instead of  one writes
one writes  and uses the term “adjoint representation”. In short: the group acts on its Lie algebra by similarity transformations. Similarity transformation of a generator is another generators. Even more, by expanding exponential into power series we can easily find that
and uses the term “adjoint representation”. In short: the group acts on its Lie algebra by similarity transformations. Similarity transformation of a generator is another generators. Even more, by expanding exponential into power series we can easily find that
(9) 
So sl(2,R) is a three dimensional real vector space and SL(2,R) acts on it by linear transformations.
But that is not all. In sl(2,R) we can define a very nice scalar product  as follows
as follows
(10) 
where  is the trace of the product of matrices and
is the trace of the product of matrices and 
Why is this scalar product “nice”? What is so nice about it? It is nice, because with this scalar product the transformations are all isometries – they preserve this scalar product:
(11) 
The derivation of this last property follows from the definitions and from the property that similarity transformations do not change the trace.
So sl(2,R) is a three dimensional real vector space with a scalar product. But in sl(2,R) we have our basis  It is easy to calculate scalar products of the basis vectors. We get the following matrix for the matrix
It is easy to calculate scalar products of the basis vectors. We get the following matrix for the matrix  with entries
with entries
(12) 
(13) 
Thus sl(2,R) has all the properties of the Minkowski space with two space and one time dimensions. The generator  has “time direction”, while
has “time direction”, while  are “space directions”.
are “space directions”.
Once we have a basis there, we can calculate the components of the transformations in this basis:
(14) 
I used Mathematica to calculate  for
for ![A=\left[\begin{smallmatrix}\alpha&\beta\\ \gamma&\delta\end{smallmatrix}\right]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-969779c63def79263f77beb857467082_l3.png "Rendered by QuickLaTeX.com") . Here is the result:
. Here is the result:
(15) 
Here I admit that in this last formula I did copy and paste from Eq. (5) above. Because indeed that is what happened in the calculation – the result came identical. And that is the real magic. We do not need external space-time and hyperboloids. Everything is already contained in the group itself and in its Lie algebra!
 So today, without further ado, I am posting the algorithm.
So today, without further ado, I am posting the algorithm. and we are considering the case with
and we are considering the case with  , where
, where  is, as always, the ratio of the doubled kinetic energy to angular momentum squared.
is, as always, the ratio of the doubled kinetic energy to angular momentum squared.








 , and do the parametric plot of the curve
, and do the parametric plot of the curve  in
in 
![\[\mathbf{r}(t)=\left(\frac{q_1(t)}{1-q_0(t)},\frac{q_2(t)}{1-q_0(t)},\frac{q_3(t)}{1-q_0(t)}\right).\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-9e9586446344017cc3859d919f8f5e33_l3.png "Rendered by QuickLaTeX.com")
 and one with
and one with  For this selected value of
For this selected value of  the time between consecutive flips, given by the formula
the time between consecutive flips, given by the formula
 we have somewhat less than 200 flips, and the lines are getting rather densely packed in certain regions.
we have somewhat less than 200 flips, and the lines are getting rather densely packed in certain regions.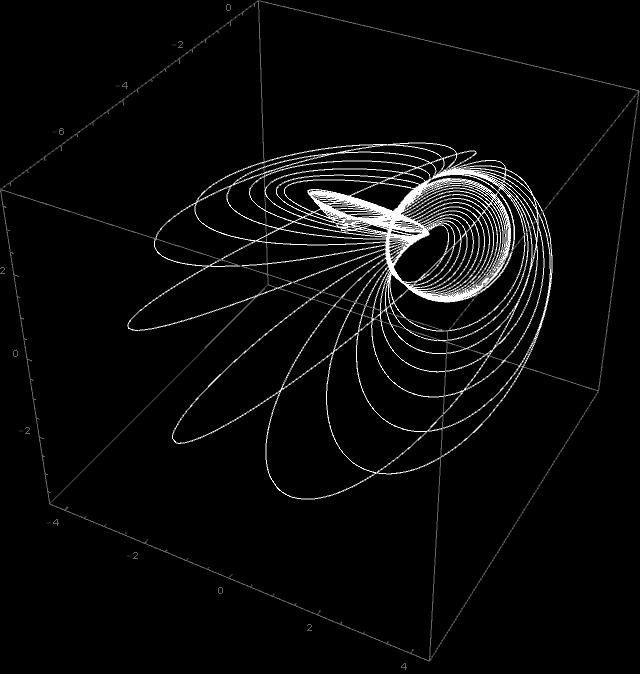



 in the 3D sphere in 4D space, the 3-sphere of quaternions of unit length. The function
in the 3D sphere in 4D space, the 3-sphere of quaternions of unit length. The function  arranged so, that it is exactly in the middle of the flip, between one story of almost uniform rotation one way in the past, and another story of almost uniform rotations, another way, in the future. For our particular path we have
arranged so, that it is exactly in the middle of the flip, between one story of almost uniform rotation one way in the past, and another story of almost uniform rotations, another way, in the future. For our particular path we have

 and
and  is a solution of Euler’s equations:
is a solution of Euler’s equations:
 other solutions. The first way is to multiply
other solutions. The first way is to multiply  If
If  is another solution. This follows by multiplying both sides of Eq. (
is another solution. This follows by multiplying both sides of Eq. ( form the left, and by noticing that
form the left, and by noticing that  being constant, enters under the symbol of differentiation
being constant, enters under the symbol of differentiation  indicated by the dot over
indicated by the dot over 
 the function
the function  is also a solution of Eq. (
is also a solution of Eq. (
 be defined as follows:
be defined as follows:
 the function
the function  is a solution of Eq. (
is a solution of Eq. ( that is all trajectories have the same origin, namely
that is all trajectories have the same origin, namely  In verifying this last property we use the fact, that
In verifying this last property we use the fact, that  are unit quaternions, therefore
are unit quaternions, therefore 
 to
to  with step
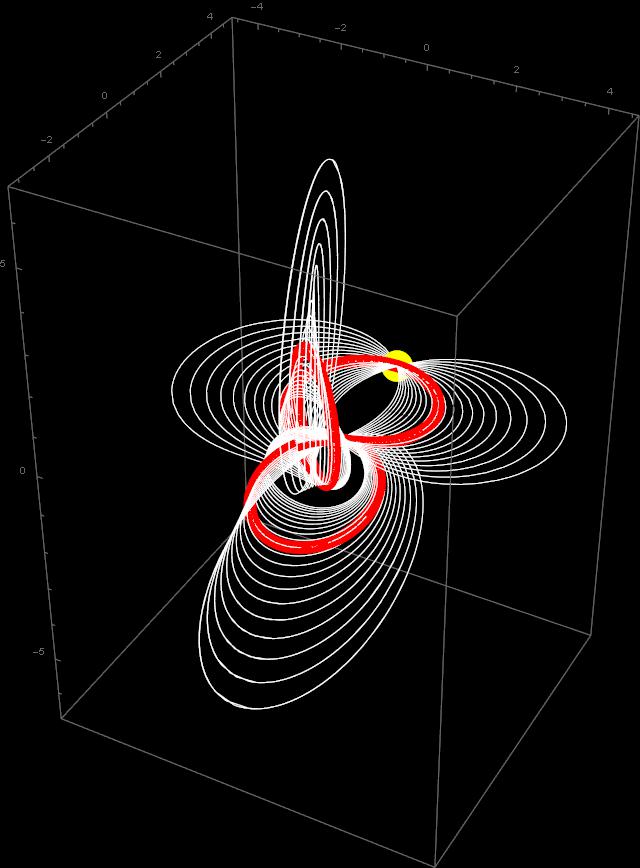
with step  Today I went further on, with
Today I went further on, with  and
and  step
step  , to produce this image:
, to produce this image:








