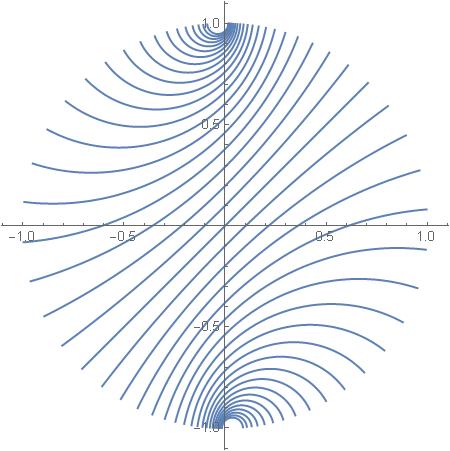
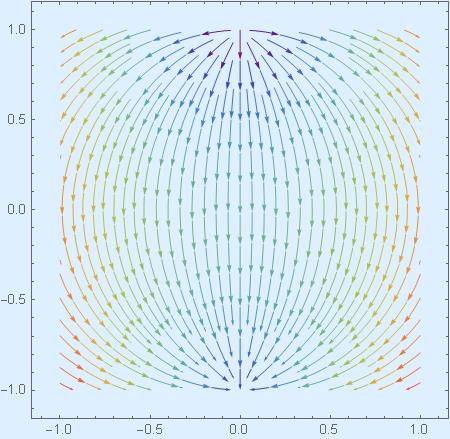
In SU(1,1) straight lines on the disk we have seen nice families of parallel straight lines in the hyperbolic geometry of the unit disk of the complex plane. Here is one such family:

Let us recall how was it obtained. We start with a template straight line through the origin  at
at  .
.

Then we take one-parameter group of SU(1,1) transformations  generated by
generated by 
(1) 
(2) 
We apply transformations to our template straight line (we use fractional linear transformations explained in previous posts), for several different values of  , and we obtain the family depicted above.
, and we obtain the family depicted above.
Let us take a particular case, with 
We have 
 therefore the point
therefore the point  on the template line is transformed into
on the template line is transformed into  given by
given by
(3) 
The whole template line is transformed as follows

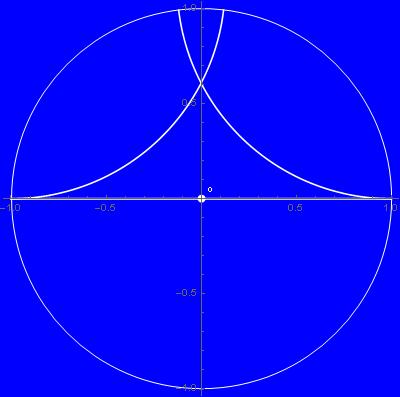
We obtain another straight line, parallel to the original one (as the two lines do not intersect). If we rotate this new line clockwise about the origin, at a certain point the two lines touch at  . That is the limit of being parallel. If we rotate further, then the two lines start to intersect.
. That is the limit of being parallel. If we rotate further, then the two lines start to intersect.
Let us calculate the angle  that we need to use to reach the limit. We set
that we need to use to reach the limit. We set  in Eq. (3) and solve for such that
in Eq. (3) and solve for such that
(4) 
Solving this I am finding (in radians)
(5) 
Our U(1) rotation group is defined by matrices
(6) 
It acts on complex numbers by:
(7) 
Therefore in order to obtain the limiting line we need to apply 
(8) 
The total transformation  that we will use is therefore
that we will use is therefore
(9) 
Acting on the point  on the real axis it produces a point in the disk
on the real axis it produces a point in the disk
(10) 
![\[=\frac{(1.7477 + 4.43167 x + 1.7477 x^2)+(1.9679 - 3.93579 x + 1.9679 x^2)i}{x^2+6.92707}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-2c0eb451728e2b80866397c192c10d3b_l3.png "Rendered by QuickLaTeX.com")
The real part,  vanishes for
vanishes for  The imaginary part has, for this the value
The imaginary part has, for this the value  . That means that at
. That means that at  the limiting line crosses the vertical imaginary axis.
the limiting line crosses the vertical imaginary axis.

We could easily repeat the above reasoning applied, this time, to the left point  We would get the second limiting line. The two lines cross at
We would get the second limiting line. The two lines cross at  , as shown below:
, as shown below:
We will continue our adventure in the next post. We will produce there this image of parallel lines – the Angel of Geometry

 and
and  I apply to this segment transformations from the one-parameter group
I apply to this segment transformations from the one-parameter group 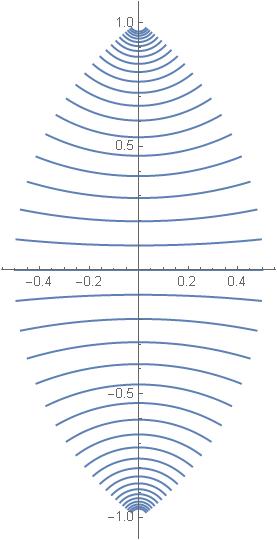
 The one-parameter group
The one-parameter group  and two curves
and two curves  such that
such that  that meet at some angle
that meet at some angle  at
at  If
If  is a matrix in SU(1,1), it sends the point
is a matrix in SU(1,1), it sends the point  and it sends the curves
and it sends the curves  and
and  to
to  and
and  The curves
The curves  meet at
meet at  at some angle
at some angle  . What we want to show is that
. What we want to show is that 
 then it will immediately follow that the statement is true in general.
then it will immediately follow that the statement is true in general. and a positive matrix
and a positive matrix  Rotations are just Euclidean rotations about the center of the disk. They evidently preserve Euclidean angles. It is therefore enough to consider
Rotations are just Euclidean rotations about the center of the disk. They evidently preserve Euclidean angles. It is therefore enough to consider  transformations.
transformations.  In coordinates
In coordinates  is described by functions
is described by functions 
 is described by functions
is described by functions  Tangent vectors to
Tangent vectors to  have components
have components  and
and  respectively. The angle
respectively. The angle ![\[ \cos \alpha_0=\frac{\dot{\gamma}_1(0)\cdot\dot{\gamma}_2(0)}{|\dot{\gamma}_1(0)||\dot{\gamma}_2(0)|}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-0ce06fd99526d6e74e93b0be3e333ccb_l3.png "Rendered by QuickLaTeX.com")
 with
with 

 into
into  given by
given by
 remembering that
remembering that  We use the standard
We use the standard 


 in the complex plane. The disk
in the complex plane. The disk  subgroup of SU(1,1), acting on SU(1,1) from the right. In
subgroup of SU(1,1), acting on SU(1,1) from the right. In  They come from exponentiation of three different generators
They come from exponentiation of three different generators  elements of the Lie algebra of the group:
elements of the Lie algebra of the group:






 for
for 
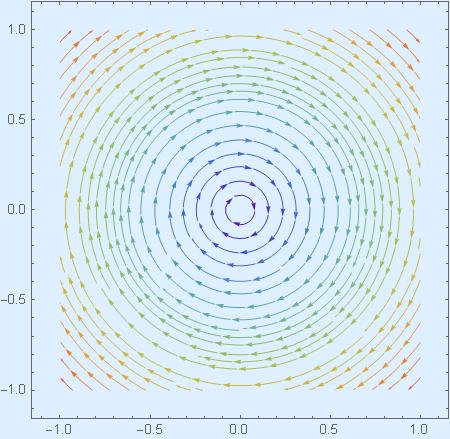
 is also a symmetry group of our geometry. Transformations from this group rotate around the center
is also a symmetry group of our geometry. Transformations from this group rotate around the center