In the last post, while getting hyperbolic, we have met the Lie group SU(1,1) – the group of  complex matrices
complex matrices  of determinant one,
of determinant one,  and such that
and such that
(1) 
where
(2) 
and star  is Hermitian conjugated matrix to
is Hermitian conjugated matrix to 
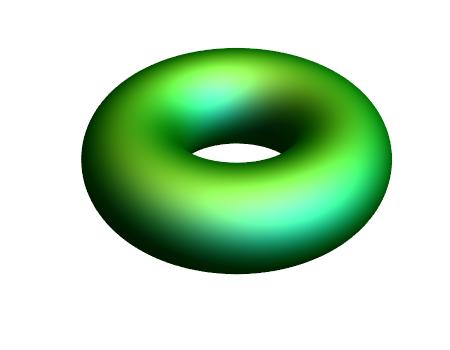
It was our first meeting here with SU(1,1), and there was no enough time to decide whether we want to make friends with this group or not. Today we will look at SU(1,1) closer, in particular at her shape. I think we will like her … She has, as we will see below, the shape of the inside of a solid torus, donut-like shape:
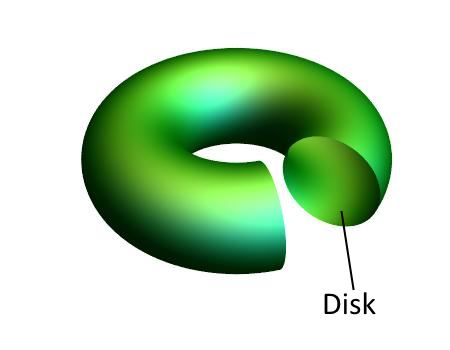
How do we get this donut? One method is to visit a backery, another method is by doing some little algebra. We will choose the second method. In fact, we are going to get not only the shape of the group itself, but also the shape of the disk that the group is acting on! It will be the cross-section of the torus:
Let us take a matrix from SU(1,1). It is a complex matrix, so let us write it as
(3) 
 we get
we get (4) 
On the other hand we have
(5) 
and so from the determining Eq. (1) we must have
(i) 
Eq. (iv) is just a complex conjugation of (iii), so it does not bring us any new information. The whole information is contained in the first three equations.
From the first two equations we deduce that, since  and
and  therefore
therefore  and
and  are non-zero. From Eq. (iii), dividing by non-zero
are non-zero. From Eq. (iii), dividing by non-zero  we get
we get
(6) 
which we substitute into Eq. (4)
![\[\lambda\rho-\frac{\lambda|\nu|^2}{\bar{\rho}}=1,\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-2bfc644fa453f7c51b3a00517a34287f_l3.png "Rendered by QuickLaTeX.com")
or, multiplying both sides with
![\[\lambda|\rho|^2-\lambda|\nu|^2=\bar{\rho}.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-330c965a03854776e2f34939de24e257_l3.png "Rendered by QuickLaTeX.com")
Then, using Eq. (ii), we get  , thus
, thus
(7) 
Therefore, from Eq. (6), we get  or
or
(8) 
So, we obtain that every matrix of SU(1,1) is of the form
(9) 
(10) 
Conversely, every matrix of this form is in SU(1,1).
Now, we will determine the shape of our beauty.
 we can write
we can write (11) 
where  is the uniquely defined phase,
is the uniquely defined phase, 
(12) 
Then, using Eq. (10)
(13) 
Thus  is in the interior of the unit disk in the complex plane.
is in the interior of the unit disk in the complex plane.
Conversely, given and  with
with  we can determine uniquely and
we can determine uniquely and  From Eq. (13) we set
From Eq. (13) we set
(14) 
then
Finally, using Eq. (12), we set
(15) 
Summarizing, the shape of SU(1,1) is that of the Cartesian product of the circle parametrized by 
 and of the interior of the unit disk, parametrized by complex numbers with
and of the interior of the unit disk, parametrized by complex numbers with  That is the interior of the solid torus, that is the donut without its skin.
That is the interior of the solid torus, that is the donut without its skin.

Pretty and tasty. Not necessarily healthy, though….








 and
and  indeed map the disk into itself. For
indeed map the disk into itself. For  at the bottom of the disk. and for
at the bottom of the disk. and for  at the right. But we can easily calculate from the equations that
at the right. But we can easily calculate from the equations that  for all
for all  and, similarly,
and, similarly,  for all
for all 
 is the fixed point of
is the fixed point of  and
and  is a fixed point of
is a fixed point of  (The disk origin
(The disk origin  is a fixed point of
is a fixed point of  ) Yet the fact that
) Yet the fact that  . This is the group of all
. This is the group of all 
 is a path in SU(1,1) through identity,
is a path in SU(1,1) through identity,  then, by differentiating the defining equation
then, by differentiating the defining equation
 and denoting
and denoting  we obtain
we obtain
![\[X=\begin{bmatrix}a&b\\c&d\end{bmatrix},\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-1d3792fbbedf08a073a78ec69a6bb24e_l3.png "Rendered by QuickLaTeX.com")
 it follows that
it follows that  that is
that is  Then for
Then for  we get
we get![\[X^*=\begin{bmatrix}a^*&c^*\\b^*&-a^*\end{bmatrix},\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-07279b73961c0768fca1b85ff3872acf_l3.png "Rendered by QuickLaTeX.com")
 and
and  Thus
Thus  is of the form
is of the form
 is real and
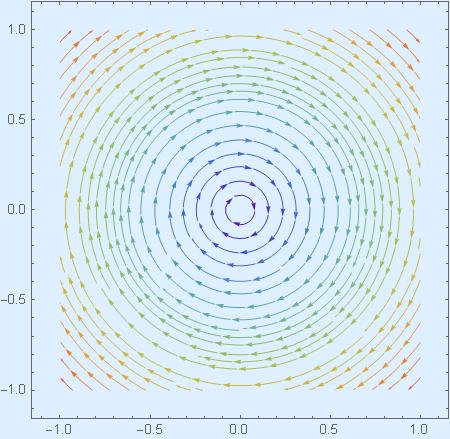
is real and  is complex. This is the Lie algebra of the group SU(1,1). I first take its generator
is complex. This is the Lie algebra of the group SU(1,1). I first take its generator
 :
:


 Doing the same for
Doing the same for  I got
I got  I obtained
I obtained 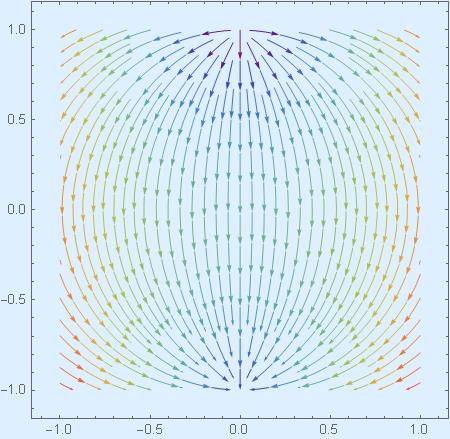

![\[h(t,z)=e^{-2it}z.\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-9ac18ffaeac646324c032772a1f65299_l3.png "Rendered by QuickLaTeX.com")
![\[Z(x,y)=(2y,-2x).\]](http://arkadiusz-jadczyk.eu/blog/wp-content/ql-cache/quicklatex.com-1d74d08987fafab94891a5c81de15bf4_l3.png "Rendered by QuickLaTeX.com")