We will start with a simple road. Like that in Nebraska in the last post,

except that we take a nice blue sky with some puffy clouds:
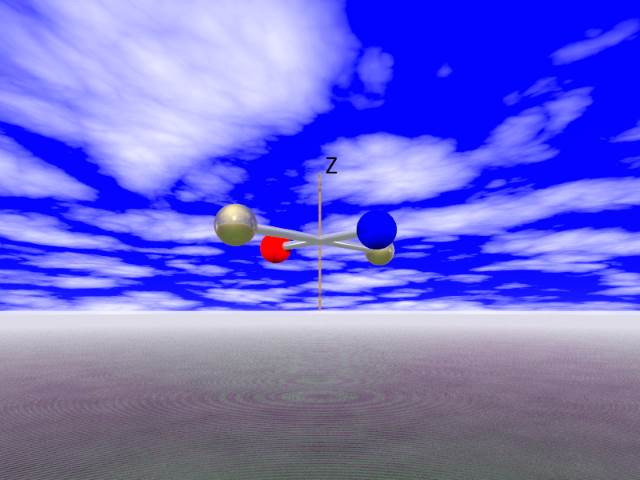
Instead of T-handle (as in Taming the T-handle ) we take the nice, asymmetric, but as much symmetric as possible, spinning top, with principal moments of inertia 
The x-axis, with the smallest moment of inertia, is along the two bronze spheres. The y-axis, with the middle moment of inertia, is along blue-red line. The z-axis, whose moment of inertia is the sum of the other two, is vertical.
The vertical z-axis is the natural axis to try to spin the thing. Imagine our top is floating in space, in zero gravity. We take the z-axis between our fingers, and spin the device. If our hand is not shaking too much, our top will nicely spin about the z-axis. This is the most stable axis for spinning.
The corresponding solution of Euler’s equation is  where
where  is a constant. The solution of the attitude matrix equation is
is a constant. The solution of the attitude matrix equation is 
The square of angular momentum vector is  the doubled kinetic energy is
the doubled kinetic energy is  the parameter
the parameter  that we were using in the previous notes is
that we were using in the previous notes is  The parameter
The parameter  is just zero,
is just zero,  In what follows for simplicity we will take
In what follows for simplicity we will take 
We will start with describing the spin history in  using stereographic projection described in Chiromancy in the rotation group.
using stereographic projection described in Chiromancy in the rotation group.
In fact, we already did it in Dzhanibekov effect – Part 1, and Dzhanibekov effect – Part 2, but that was at the very beginning of this series, and we did not know yet what we were doing! So, now we do it again, in a more “legal” way.
Rotation about an axis  by an angle
by an angle  can be described by (see Eq. (4) in Putting a spin on mistakes) an
can be described by (see Eq. (4) in Putting a spin on mistakes) an  matrix:
matrix:
(1) 
In fact in Putting a spin on mistakes I have made a mistake that I corrected only at this moment, when checking it again: I have forgotten the imaginary  in the formula!
in the formula!
We will be rotating about the z-axis, so we take  Then
Then  Therefore
Therefore
(2) 
Comparing with Eq. (1) in Chiromancy in the rotation group, we get
(3) 
The stereographic projection (Eq. (4) in Chiromancy in the rotation group ) is
(4) 
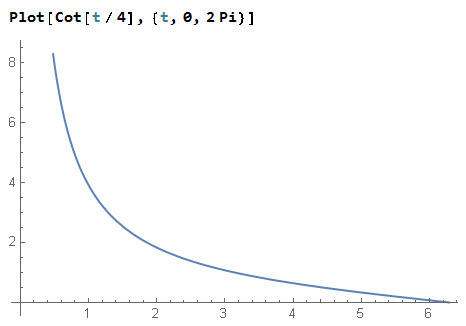
We can use trigonometric formulas to simplify:
(5) 
Here is the plot of  from
from  to
to  :
:
At  we have
we have  That is OK, because at the frame of the body coincides with the laboratory frame. The rotation
That is OK, because at the frame of the body coincides with the laboratory frame. The rotation  is the identity, its stereographic image is at infinity.
is the identity, its stereographic image is at infinity.
At  we get
we get  That is the point representing the matrix
That is the point representing the matrix  It also describes the identity rotation in
It also describes the identity rotation in  We get a straight path, the positive part of the z-axis. It is like the road in Nebraska at the top.
We get a straight path, the positive part of the z-axis. It is like the road in Nebraska at the top.
In the next posts we will learn how to travel more dangerous, less traveled roads.




